
Curvilinear coordinate system
Har inget facit, men har jag gjort rätt?
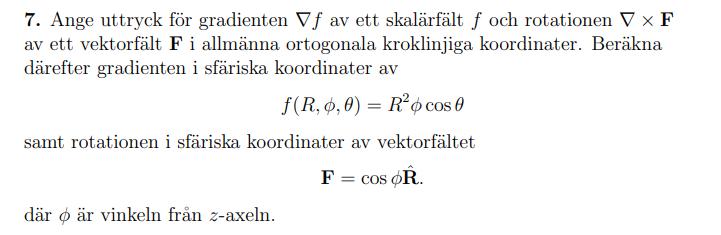


Nja, du måste läsa på om kroklinjiga koordinater. Tex här.
Men tänk på att gradienten av ett skalärfält är ett vektorfält, så redan där går det fel.
Är det dessa två formler som gäller nu alltså?

Tillägg: 18 okt 2021 16:09
Aha, jag tror att jag måste integrera eller?
De frågar efter gradienten, inte divergensen.
Ok. Så uttrycket borde bli
eller?
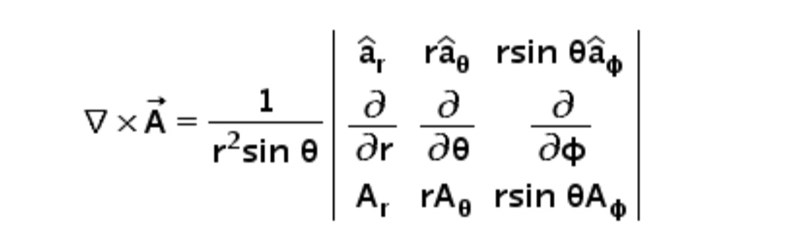
Ja, fast de ville ha det i allmänna ortogonala kroklinjiga koordinater först. Och sedan konkret för sfäriska koordinater.
Hade gärna uppskattat om du kunde visa vad du menar.
De allmänna formlerna står i länken som nämnde tidigare.
Ja. Det var så jag listade ut vad det skulle bli :(
Jo, men du skrev ut speciellt för sfäriska koordinater. Använd generella beteckningar tex u, v , w, eller u1, u2, u3.
Jaja... :/ typ så?
Precis.
Rätt?
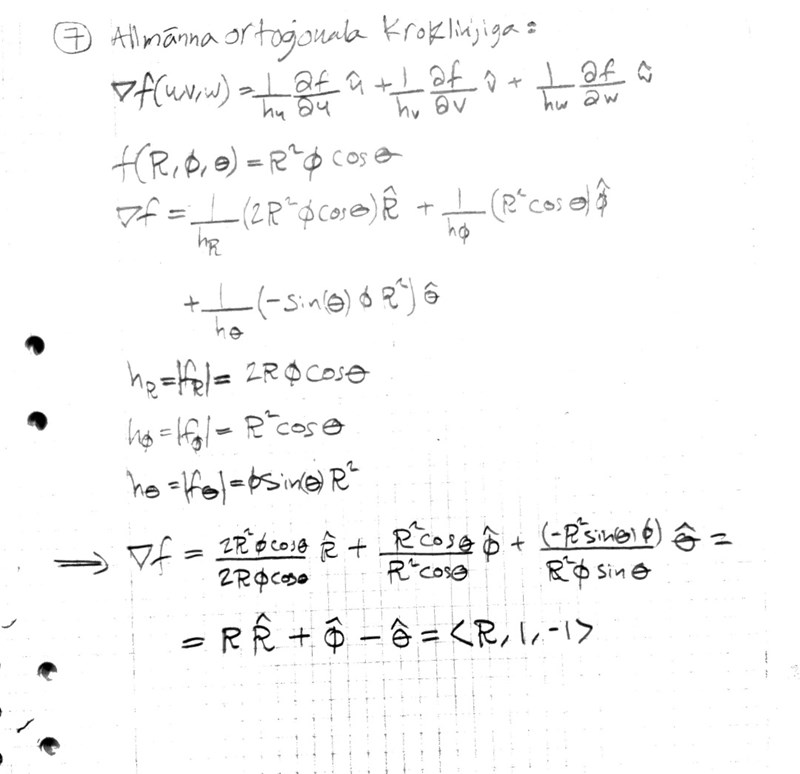
Nej. h:na är helt fel - kolla länken igen.
Jag håller inte med om det tror jag. Dock håller jag med om att jag deriverade fel med avseende på
Därefter räknar jag ut skalfaktorn genom att
Om det jag skriver är fel, då vet jag inte hur jag ska vidare. Här läst i länken.
Nja, skalfaktorerna har ingenting med funktionen f att göra, de beror på det koordinatsystem som man valt.
hR =
+ +
Nu måste det stämma?

= + + .
Hur?????? Jag får jag skalfaktorn och då får jag: ....
Edit: Jag ersätter skalfaktorn i fel ställe.
Tillägg: 18 okt 2021 23:07
Jag får nu samma svar som dig PATENTERAMERA.
