
Transponering
Jag har uppenbarligen en problem med transponering.
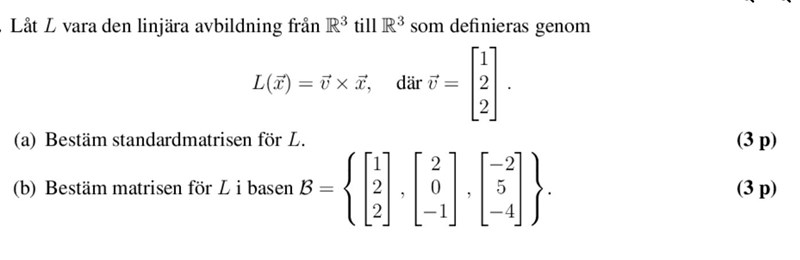
Avbildningmatrisen ges av:
Man avbildar basvektorer av B med L och får:
Så man kan skriva om avbildningarna som:
Varför måste jag nu transponera resultat? Alltså varför är matrisen och inte ? Jag trodde att det var samma sak som att skriva: ?
additionell fråga: så eftersom avbildningen är en kryssprodukt mot (1, 2, 2)^T, blir bilden av (1, 2, 2) vinkelrätt...? Eller något sånt?

EDIT: Hoppsan, jag tänkte lite snabbt till en början.
Felet du gör är när du skall konstruera en matris med vektorn:
Pröva multiplicera ut din matris med så ser du att det blir fel tecken på alltihop. Du borde få:
Vilket ger det eftersökta svaret.

Standardmatrisen () för är samma sak som den matris som representerar när man använder standardbasen till . Det betyder att är en matris av typ vars kolonner är vektorerna , vilket här är vektorerna .
Det ger standardmatrisen
Såklart slarvade jag när jag skrev på forumet, men jag lyckades inte glömma min minus tecken framför andra linjen på pappret. Jag får som ni poängterar (0,2,−2)^T , (−2,0,1)^T och (2,−1,0)^T.
Men det är inte det jag frågar, utan den sista. Varför måste jag skriva resultaten (den linjära kombination av basvektorer alltså) som kolonvektorer istället för som en ekvationssystem (med hänsyn på hur matrismultiplikation fungerar, visst borde det vara ekvationssystem?)
Jaha, du undrar alltså varför de avbildade basvektorerna , och läggs som kolonner och inte rader i matrisen.
Det enkla svaret är att man alltid gör så. När man ska beskriva en linjär transformation med en matris ser man var basvektorerna hamnar och lägger dem som kolonner.
Man gör faktiskt samma sak med ekvationssystemen. Det är bara att där är en avbildad vektor alla termer som innehåller en viss variabel. De läggs i kolonnerna. Exempelvis kan:
skrivas som
Notera att här hamnade alla -termer i kolonnen till vänster, alla -termer i mittenkolonnen och alla -termer i högerkolonnen. Alltså lägger man vektorerna som kolonner även här.
Hmmm jag är ledsen, jag förstår inte. Du låg dem i rader?

När jag läste lineär algebra, för många år sen, så hade vi en lärobok (boken med kossan på) som på omslaget hade en rebus som utläses "KOordinater alltid i KOlonn", som en minnesregel att man lägger koordinaterna (i det här fallet bilden av basvektorerna) som kolonner i matrisen (som representerar avbildningen i basen).
Men det är egentligen ett godtyckligt val som följer från att man representerar vektorer i vektorrummet (given en viss bas) som kolonnvektorer och avbildningen med matrisen A som Ax, dvs matrisen till vänster och vektorn till höger.
Det går i princip lika bra att göra tvärtom, dvs representera vektorer som radvektorer och avbildningen som xA och då blir allt tvärtom (rader är bilden av basvektorerna), men det kan du nog bortse från just nu.
Som AlvinB skrev så är det koefficienterna framför x (för de olika raderna) som blir första kolumnen, osv.
Du tänker på koefficienterna i x-2y+5z = 2, men det är koefficienterna för en normalvektor, det är i princip en kovektor och inte en vektor och då blir koordinaterna i rad istället för kolumn.
Jo, jag hört talat att det var en annan book förut men dem har bytt det förra året 😀!
Ok, vi säger att jag skriver dem alltid i kolonner, och jag har 99% chans att vara rätt. Det låter bra.
Det är mer än 99% chans att koordinater alltid är i kolonn, det är först när du kommer in på matematisk statistik och markovkedjor du kommer se motsatsen, de gillar p_(i+1) = p_i T där p_i är en radvektor (med sannolikheter) och T är en matris med övergångssannolikheter, men det är en senare fråga, bekymra dig inte över det nu.
Vad jag menar är att med ett ekvationssystem hamnar koefficienterna för en viss variabel i kolonnerna i matrisen:

vilket kan se ut som att man tar varje ekvations koefficienter och lägger dem som rader, men det är detta man egentligen gör.
Anledningen till detta är att vid en matrismultiplikation multipliceras -koordinaten med vänsterkolonnen, -koordinaten med mittenkolonnen och -koordinaten med högerkolonnen:
När man då skall skriva ekvationssystemet med en matris inser man då att alla -termer blir den vänstra kolonnvektorn, alla -termer blir den mittersta kolonnvektorn o.s.v. Ekvationssystemet är alltså en sammanslagning av alla kolonnvektorer på en gång.
Däremot när vi skall konstruera en matris av en avbildning där vi vet basvektorernas avbildningar (som i denna uppgift) är det bara att lägga dem som kolonnvektorer eftersom här har vi var och en av basvektorernas avbildningar var för sig.
Det är så vackert illuminerat att jag måste titta på det en gång till en morgon bitti -och innan provet!
Tack 🌹🌷!
Uttryckt med hjälp av standardbasen ser den linjära avbildningen ut som
vilket kan skrivas som matrismultiplikation
där kolonnerna hos matrisen är vektorerna hos basen .
Basen transformeras till basen via tranformationsmatrisen där
vilket betyder att den linjära avbildningen kan uttryckas som matrisprodukten
så att avbildningens matris i basen är lika med matrisprodukten
Den givna basen indikerar att tranformationsmatrisen ser ut som
vilket ger den inversa matrisen
och den linjära avbildningen representeras av matrisen
.
