
Bestäm brandmannens hastighet v och acceleration relativt den fixa marken
Hej!
Jag vet att v kan anges som r(cirkel)_rel. Men hur hittar man r(cirkel)_rel? Jag undrar hur man ska tänka gällande accelerationen


För att få så skall du derivera map t, men se basvektorerna som om de var oberoende av tiden.
Sedan gäller det att .
PATENTERAMERA skrev:För att få så skall du derivera map t, men se basvektorerna som om de var oberoende av tiden.
Sedan gäller det att .
Varför måste enhetsvektorerna vara med i uttrycket för r_rel? Så basvektorerna är alltid tidsoberoebde? Hm vilken omega w ska man använda? Ändringen omegaprick eller vanliga omega w?

destiny99 skrev:PATENTERAMERA skrev:För att få så skall du derivera map t, men se basvektorerna som om de var oberoende av tiden.
Sedan gäller det att .
Varför måste enhetsvektorerna vara med i uttrycket för r_rel?
När man ska derivera en vektor är det lättare att skriva ut basvektorerna än att skriva på formen (a, b). Just då eftersom basvektorerna också kanske förändras.
Så basvektorerna är alltid tidsoberoebde?
Inte alltid. Men här kan vi tänka oss att , om jag läser rätt, roterar med .
Hm vilken omega w ska man använda? Ändringen omegaprick eller vanliga omega w?
Rotationsvektorn . Inte vinkelaccelerationen.
Ja, det primmade systemet roterar kring z’-axeln. .
MrPotatohead skrev:destiny99 skrev:PATENTERAMERA skrev:För att få så skall du derivera map t, men se basvektorerna som om de var oberoende av tiden.
Sedan gäller det att .
Varför måste enhetsvektorerna vara med i uttrycket för r_rel?
När man ska derivera en vektor är det lättare att skriva ut basvektorerna än att skriva på formen (a, b). Just då eftersom basvektorerna också kanske förändras.
Så basvektorerna är alltid tidsoberoebde?
Inte alltid. Men här kan vi tänka oss att , om jag läser rätt, roterar med .
Hm vilken omega w ska man använda? Ändringen omegaprick eller vanliga omega w?
Rotationsvektorn . Inte vinkelaccelerationen.
Hm okej men jag vet inte om jag hänger med riktigt på det här med om enhetsvektorerna förändras eller inte, alltså hur man vet det. Jag är ganska ny på det här området. Så om jag deriverar rrel så får jag även derivera enhetsvektorerna?
PATENTERAMERA skrev:Ja, det primmade systemet roterar kring z’-axeln. .
Ah ok.
Jag misstänker att detta handlar om rörliga koordinatsystem. Det finns en mängd formler för detta. Kolla upp dessa formler i boken. Se till att du förstår hur de är tänkt att användas.
Tex kan formlerna se ut som nedan. Men en viss variation mellan olika böcker förekommer.

PATENTERAMERA skrev:Jag misstänker att detta handlar om rörliga koordinatsystem. Det finns en mängd formler för detta. Kolla upp dessa formler i boken. Se till att du förstår hur de är tänkt att användas.
Tex kan formlerna se ut som nedan. Men en viss variation mellan olika böcker förekommer.
Ja precis. Några av dem ser ut såhär i den boken jag har. Det handlar om rörliga system. Hur ska deriveringen av r_rel gå till? Jag fastnade på den delen




Såhär fick jag på tidsderivatan av rrel samt hastigheten
Det kanske blir snyggare om man skriver det som (någonting) + (någonting).
Utnyttja också att
Obs jag ser att jag skrev fel tidigare. .
.
PATENTERAMERA skrev:Obs jag ser att jag skrev fel tidigare. .
.

Det verkar inte rätt efter

PATENTERAMERA skrev:Det verkar inte rätt efter
Hm jag förstår inte vad du menar är fel. Tyvärr har jag inget facit i denna uppgift så kan ej se vad som gått snett.
Detta får jag nu. Men när jag ska tidsderivera v_rel så ska jag alltså inte derivera enhetsvektorerna? Sen blir det en utmaning att derivera tex lthetapricksintheta och lthetaprickcostheta termerna

Nej, det är just själva grejen med ”ringen”. Man ”låtsas” som om basvektorerna skulle vara konstanta (fast de inte är det) och deriverar på samma sätt som man skulle gjort om basvektorerna var konstanta.
Tillägg: 3 sep 2025 22:09
PATENTERAMERA skrev:Nej, det är just själva grejen med ”ringen”. Man ”låtsas” som om basvektorerna skulle vara konstanta (fast de inte är det) och deriverar på samma sätt som man skulle gjort om basvektorerna var konstanta.
Tillägg: 3 sep 2025 22:09
Jaa asså jag förstår inte varför enhetsvektorerna ska deriveras om de är konstanta? Jag kanske missuppfattar dig nu. Men det blir jättejobbigt att derivera om allt igen med derivator av ex' och ez'
 detta är vad jag får nu på arel enligt #17. Men jag hoppas du kan klargöra det här med varför man skall derivera enhetsvektorerna? Är det för att de rör sig kanske i ett rörligt system jämfört med inertialsystem där man antog de var konstanta?
detta är vad jag får nu på arel enligt #17. Men jag hoppas du kan klargöra det här med varför man skall derivera enhetsvektorerna? Är det för att de rör sig kanske i ett rörligt system jämfört med inertialsystem där man antog de var konstanta?
destiny99 skrev:PATENTERAMERA skrev:Nej, det är just själva grejen med ”ringen”. Man ”låtsas” som om basvektorerna skulle vara konstanta (fast de inte är det) och deriverar på samma sätt som man skulle gjort om basvektorerna var konstanta.
Tillägg: 3 sep 2025 22:09
Jaa asså jag förstår inte varför enhetsvektorerna ska deriveras om de är konstanta? Jag kanske missuppfattar dig nu. Men det blir jättejobbigt att derivera om allt igen med derivator av ex' och ez'
Detta är bara för att du skall förstå skillnaden mellan att derivera med ”ring” och med ”prick”. Enhetsvektorerna är inte konstanta, utan varierar med tiden relativt den fixa referensramen (marken). Men när du deriverar med ”ring” så deriverar du som om de vore konstanta. Dvs du ser förändringen av vektorn på det sätt som en observatör som följer med det roterande koordinatsystemet gör.
PATENTERAMERA skrev:destiny99 skrev:PATENTERAMERA skrev:Nej, det är just själva grejen med ”ringen”. Man ”låtsas” som om basvektorerna skulle vara konstanta (fast de inte är det) och deriverar på samma sätt som man skulle gjort om basvektorerna var konstanta.
Tillägg: 3 sep 2025 22:09
Jaa asså jag förstår inte varför enhetsvektorerna ska deriveras om de är konstanta? Jag kanske missuppfattar dig nu. Men det blir jättejobbigt att derivera om allt igen med derivator av ex' och ez'
Detta är bara för att du skall förstå skillnaden mellan att derivera med ”ring” och med ”prick”. Enhetsvektorerna är inte konstanta, utan varierar med tiden relativt den fixa referensramen (marken). Men när du deriverar med ”ring” så deriverar du som om de vore konstanta. Dvs du ser förändringen av vektorn på det sätt som en observatör som följer med det roterande koordinatsystemet gör.
Ah ok så en observatör ser förändringen av vektorn bara medan personen som är med i det roterande koordinatsystemet världen ser även att enhetsvektorerna förändras?
Du skall inte derivera basvektorerna när du beräknar .
destiny99 skrev:PATENTERAMERA skrev:destiny99 skrev:PATENTERAMERA skrev:Nej, det är just själva grejen med ”ringen”. Man ”låtsas” som om basvektorerna skulle vara konstanta (fast de inte är det) och deriverar på samma sätt som man skulle gjort om basvektorerna var konstanta.
Tillägg: 3 sep 2025 22:09
Jaa asså jag förstår inte varför enhetsvektorerna ska deriveras om de är konstanta? Jag kanske missuppfattar dig nu. Men det blir jättejobbigt att derivera om allt igen med derivator av ex' och ez'
Detta är bara för att du skall förstå skillnaden mellan att derivera med ”ring” och med ”prick”. Enhetsvektorerna är inte konstanta, utan varierar med tiden relativt den fixa referensramen (marken). Men när du deriverar med ”ring” så deriverar du som om de vore konstanta. Dvs du ser förändringen av vektorn på det sätt som en observatör som följer med det roterande koordinatsystemet gör.
Ah ok så en observatör ser förändringen av vektorn bara medan personen som är med i det roterande koordinatsystemet världen ser även att enhetsvektorerna förändras?
Tvärtom, för en person som står på marken ändras de. Men de uppfattas som konstanta av en person som följer med det roterande systemet.
PATENTERAMERA skrev:Du skall inte derivera basvektorerna när du beräknar .
Jaha ok så de termerna där jag deriverat ex' och ez' ska bort? Jag uppfattade som att om man deriverar r(ringring)rel så ska man även derivera enhetsvektorerna i det roterande koordinatsystemet?
PATENTERAMERA skrev:destiny99 skrev:PATENTERAMERA skrev:destiny99 skrev:PATENTERAMERA skrev:Nej, det är just själva grejen med ”ringen”. Man ”låtsas” som om basvektorerna skulle vara konstanta (fast de inte är det) och deriverar på samma sätt som man skulle gjort om basvektorerna var konstanta.
Tillägg: 3 sep 2025 22:09
Jaa asså jag förstår inte varför enhetsvektorerna ska deriveras om de är konstanta? Jag kanske missuppfattar dig nu. Men det blir jättejobbigt att derivera om allt igen med derivator av ex' och ez'
Detta är bara för att du skall förstå skillnaden mellan att derivera med ”ring” och med ”prick”. Enhetsvektorerna är inte konstanta, utan varierar med tiden relativt den fixa referensramen (marken). Men när du deriverar med ”ring” så deriverar du som om de vore konstanta. Dvs du ser förändringen av vektorn på det sätt som en observatör som följer med det roterande koordinatsystemet gör.
Ah ok så en observatör ser förändringen av vektorn bara medan personen som är med i det roterande koordinatsystemet världen ser även att enhetsvektorerna förändras?
Tvärtom, för en person som står på marken ändras de. Men de uppfattas som konstanta av en person som följer med det roterande systemet.
Okej så personen på marken är observatören medan den personen som följer med det roterande systemet ser de enhetsvektorerna som konstanta?
Ja, när du använder ring-operatorn så deriverar du inte basvektorerna i det rörliga systemet.
destiny99 skrev:PATENTERAMERA skrev:destiny99 skrev:PATENTERAMERA skrev:destiny99 skrev:PATENTERAMERA skrev:Nej, det är just själva grejen med ”ringen”. Man ”låtsas” som om basvektorerna skulle vara konstanta (fast de inte är det) och deriverar på samma sätt som man skulle gjort om basvektorerna var konstanta.
Tillägg: 3 sep 2025 22:09
Jaa asså jag förstår inte varför enhetsvektorerna ska deriveras om de är konstanta? Jag kanske missuppfattar dig nu. Men det blir jättejobbigt att derivera om allt igen med derivator av ex' och ez'
Detta är bara för att du skall förstå skillnaden mellan att derivera med ”ring” och med ”prick”. Enhetsvektorerna är inte konstanta, utan varierar med tiden relativt den fixa referensramen (marken). Men när du deriverar med ”ring” så deriverar du som om de vore konstanta. Dvs du ser förändringen av vektorn på det sätt som en observatör som följer med det roterande koordinatsystemet gör.
Ah ok så en observatör ser förändringen av vektorn bara medan personen som är med i det roterande koordinatsystemet världen ser även att enhetsvektorerna förändras?
Tvärtom, för en person som står på marken ändras de. Men de uppfattas som konstanta av en person som följer med det roterande systemet.
Okej så personen på marken är observatören medan den personen som följer med det roterande systemet ser de enhetsvektorerna som konstanta?
De kan väl båda ses som observatörer, fast med olika perspektiv på saker.
Tillägg: 3 sep 2025 23:13
Ja, han som följer med i rotationen ser basvektorerna som konstanta.
PATENTERAMERA skrev:Ja, när du använder ring-operatorn så deriverar du inte basvektorerna i det rörliga systemet.
Jaha ok jag förstår. Så vad står rprick_rel för då som har deriverade basvektorer i det rörliga systemet?
destiny99 skrev:PATENTERAMERA skrev:Du skall inte derivera basvektorerna när du beräknar .
Jaha ok så de termerna där jag deriverat ex' och ez' ska bort? Jag uppfattade som att om man deriverar r(ringring)rel så ska man även derivera enhetsvektorerna i det roterande koordinatsystemet?
Tvärtom, ring-operatorn tar inte med förändringen av basvektorerna. Se dem som konstanter närvar du använder ring-operatorn.
destiny99 skrev:PATENTERAMERA skrev:Ja, när du använder ring-operatorn så deriverar du inte basvektorerna i det rörliga systemet.
Jaha ok jag förstår. Så vad står rprick_rel för då som har deriverade basvektorer i det rörliga systemet?
Prick betyder derivering relativt det fixa systemet (marken). Här är ses inte basvektorerna som konstanter.
Nu verkar diskussionen handla om något annat, men kanske det ger en bättre förståelse om du får se härledningen av hastigheten:
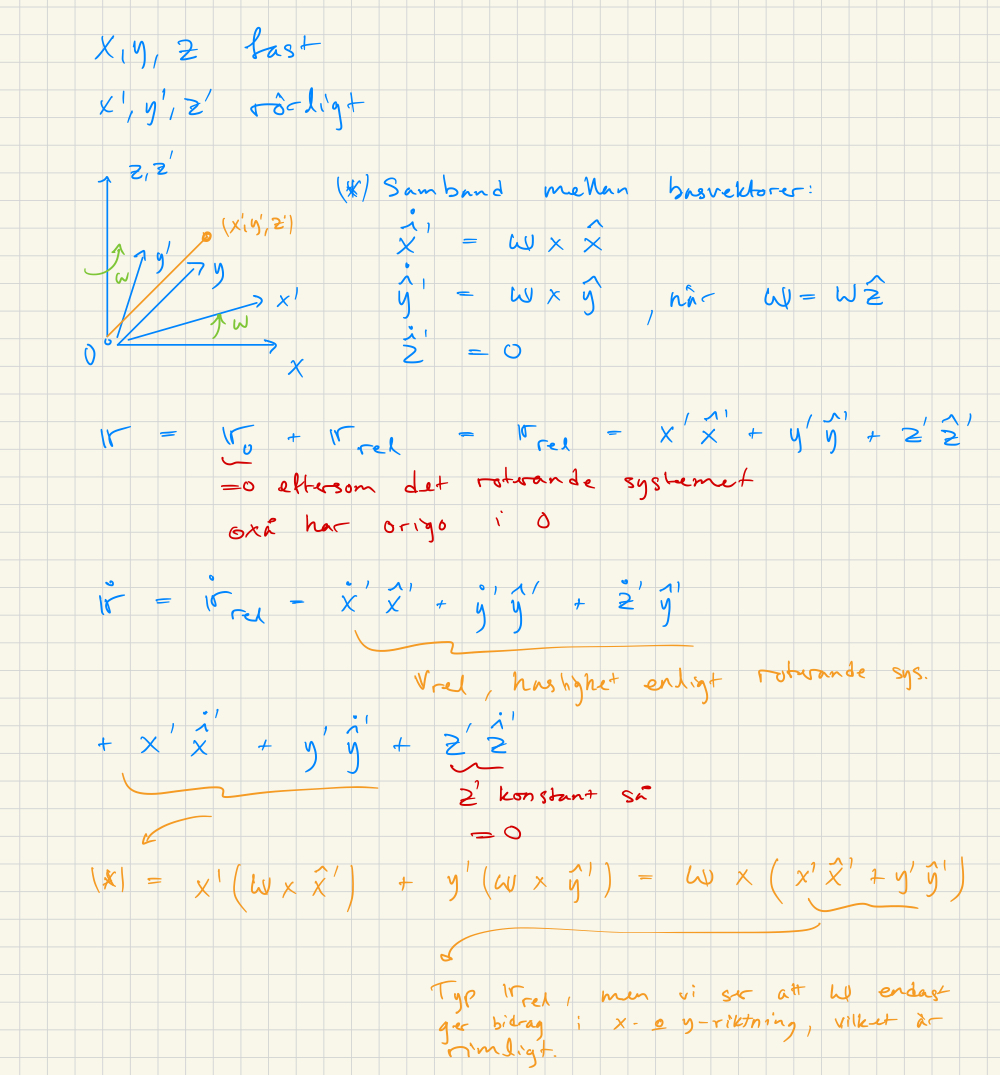
Tillägg: 3 sep 2025 23:21
Fixade till några hattar.
PATENTERAMERA skrev:destiny99 skrev:PATENTERAMERA skrev:Ja, när du använder ring-operatorn så deriverar du inte basvektorerna i det rörliga systemet.
Jaha ok jag förstår. Så vad står rprick_rel för då som har deriverade basvektorer i det rörliga systemet?
Prick betyder derivering relativt det fixa systemet (marken). Här är ses inte basvektorerna som konstanter.
Ja jag förstår. Jag tänker bara när ska man använda rprick_rel och r(ringring)_rel i förhållande till uppgiften? Man hade ju kunnat tolka uppgiften som att vi är ute efter rprick_rel.
Ja, i detta fall stämmer det, eftersom origo i det roterande systemet är fixt.
Så i detta fall stämmer det att .
Sedan har du den generella formeln
.
PATENTERAMERA skrev:Ja, i detta fall stämmer det, eftersom origo i det roterande systemet är fixt.
Så i detta fall stämmer det att .
Sedan har du den generella formeln
.
Men då ska jag ha med sista termen i såna fall där basvektorerna ska deriveras. jag hittar förresten inte där omega kryss x ska vara med (generella formeln som du pratar om) i min bok enligt bilden i #9 utan istället vsp=vO'+w×rrel där vsp betecknar systempunktens hastighet
Ur definieras ”ring” i eran bok?
destiny99 skrev:PATENTERAMERA skrev:Ja, i detta fall stämmer det, eftersom origo i det roterande systemet är fixt.
Så i detta fall stämmer det att .
Sedan har du den generella formeln
.
Men då ska jag ha med sista termen i såna fall där basvektorerna ska deriveras. jag hittar förresten inte där omega kryss x ska vara med (generella formeln som du pratar om) i min bok enligt bilden i #9 utan istället vsp=vO'+w×rrel där vsp betecknar systempunktens hastighet
Lättast är att utnyttja att .
PATENTERAMERA skrev:destiny99 skrev:PATENTERAMERA skrev:Ja, i detta fall stämmer det, eftersom origo i det roterande systemet är fixt.
Så i detta fall stämmer det att .
Sedan har du den generella formeln
.
Men då ska jag ha med sista termen i såna fall där basvektorerna ska deriveras. jag hittar förresten inte där omega kryss x ska vara med (generella formeln som du pratar om) i min bok enligt bilden i #9 utan istället vsp=vO'+w×rrel där vsp betecknar systempunktens hastighet
Lättast är att utnyttja att .
Men vad är rprick_rel lika med då ? v eller? Vi vet att v_rel=r(ring)_rel och vad är isåfall rprick_O' lika med? Om jag använder detta uttryck ovan så har jag bara hastigheten om jag förstått detta rätt. Men sen ska vi ju ha accelerationen också och då ska jag derivera hastigheten (tror jag glömde sista termen med omega vid kryssprodukten)

PATENTERAMERA skrev:Ur definieras ”ring” i eran bok?
jag vet inte. Men som jag förstått detta är det bara samma notation som prick fast man syftar på det rörliga systemet och det här med basvektorer som du sa var konstanta men när man deriverar dem är de inte konstanta längre om jag inte helt ute o cyklar. Fast nu sa du att man inte ska derivera basvektorerna (?)
Kolla i boken igen. Var inför de ring-operatorn först? Det verkar konstigt om man helt plötsligt börjar använda "ring" utan att någonstans förklara vad som menas.
Hursomhelst, ring-operatorn betecknar tidsderivatan av vektorer relativt det rörliga systemet. Eftersom basvektorerna för det rörliga systemet kan ses som fixa relativt det rörliga systemet så skall de ses som konstanta vektorer när man använder ring.
Dvs, det gäller tex att
Är den notationen vanlig? Stötte aldrig på den i varken mekanik 1 eller 2.
AI-svar.

Intressant att det kan vara "very common" när 2/3 av de mest använda kursböckerna inom ämnet inte använder det, också enligt AI. :)
Jag kommer i håg att man använde ring i Thors mekanikböcker som var populära på KTH under 80-talet.
Vilken notation är vanligast i dag?
Jag föredrar dock den något mer generella notationen som tex framförs i Dynamics av Kane och Levison. Dynamics.
Tillägg: 4 sep 2025 13:55
Och grattis till 7777. Sju är ju fulländningens tal.
PATENTERAMERA skrev:Kolla i boken igen. Var inför de ring-operatorn först? Det verkar konstigt om man helt plötsligt börjar använda "ring" utan att någonstans förklara vad som menas.
Hursomhelst, ring-operatorn betecknar tidsderivatan av vektorer relativt det rörliga systemet. Eftersom basvektorerna för det rörliga systemet kan ses som fixa relativt det rörliga systemet så skall de ses som konstanta vektorer när man använder ring.
Dvs, det gäller tex att
Ja okej. Så om jag deriverar v så skall jag få r(ringring)_rel utan att derivera basvektorerna?
Såhär gjorde facit förresten. Jag förstår inte varför de använder sig av systempunktens hastighet , var talar man om systempunktens hastighet här? samt accelerationsformeln där acor, asp och arel är med. Det jag fick fram på accelerationen i #19 är inte samma som dem. Vad gör jag för fel?

Du får visa din lösning.
Tillägg: 4 sep 2025 15:02
Notera att de använder bara de färdiga formlerna som du visade i #9.
Läs igenom hur man kom fram till dessa formler.
PATENTERAMERA skrev:Du får visa din lösning.
Tillägg: 4 sep 2025 15:02
Notera att de använder bara de färdiga formlerna som du visade i #9.
Läs igenom hur man kom fram till dessa formler.
Ja precis men jag undrar varför de använder dessa formler mer specifikt vsp , asp och acor. Min lösning är i #19. Jag har ingen annan lösning än de senaste. Därför postade jag lösningsförslaget för den nya boken istället. Det verkar som att jag fått rätt på v_rel. De formler de använder är ingenting jag har tänkt på riktigt. Men jag antar att man kan få samma svar utan att använda sig av deras formler? Isåfall borde mitt svar nedan vara rätt. Men jag saknar en faktor två för ex' termen och ez' termen.

Så här får jag.

PATENTERAMERA skrev:Så här får jag.
Yes det är samma svar som facit. Jag får derivera uttrycket för v_rel igen och se om jag får samma som dig. Tror det blev räknefel kanske
Ja, tänk på att l-prick och theta-prick är konstanta, så det förenklar lite.
