
Bestäm detta kraftmoment med belopp och riktning
Hej!
jag är lite lost på denna uppgift i a) då jag inte vet om de söker H=rxmv.


De söker det kraftmoment som grammofonspelaren skall påverka skivan med för att dess vinkelhastigheten skall förbli konstant.
Du kan utnyttja att .
Där är kraftmomentet kring skivans centrum och där är rörelsemängdsmomentet för skivan + skalbaggen.
PATENTERAMERA skrev:De söker det kraftmoment som grammofonspelaren skall påverka skivan med för att dess vinkelhastigheten skall förbli konstant.
Du kan utnyttja att .
Där är kraftmomentet kring skivans centrum och där är rörelsemängdsmomentet för skivan + skalbaggen.
Okej och vad är H_c i vårt fall? Är det då r×mv0?
Själva skivan ger bidraget J, där J är skivans tröghetsmoment kring rotationsaxeln. Obs detta bidrag är konstant så det försvinner då du deriverar.
Sedan får du ett bidrag från skalbaggen som är , där är skalbaggens hastighet.
PATENTERAMERA skrev:Själva skivan ger bidraget J, där J är skivans tröghetsmoment kring rotationsaxeln. Obs detta bidrag är konstant så det försvinner då du deriverar.
Sedan får du ett bidrag från skalbaggen som är , där är skalbaggens hastighet.
Vad menas med Jw0?
Menar du det här?

destiny99 skrev:PATENTERAMERA skrev:Själva skivan ger bidraget J, där J är skivans tröghetsmoment kring rotationsaxeln. Obs detta bidrag är konstant så det försvinner då du deriverar.
Sedan får du ett bidrag från skalbaggen som är , där är skalbaggens hastighet.
Vad menas med Jw0?
har införts i problemtexten. J förklarade jag i #4.
destiny99 skrev:Menar du det här?
Ja, precis.
PATENTERAMERA skrev:Själva skivan ger bidraget J, där J är skivans tröghetsmoment kring rotationsaxeln. Obs detta bidrag är konstant så det försvinner då du deriverar.
Sedan får du ett bidrag från skalbaggen som är , där är skalbaggens hastighet.
Så vi har att H= Jw0+r×mv och Jw0=0 pga konstant vinkelhastighet. Men vi har ju fått givet v0 också i frågan? Ska man inte använda den för att ta reda på skalbaggens hastighet?
Varför har du btw ez med i Jw0? Hur vet man om man ska ha ez, ey eller ex ?
destiny99 skrev:PATENTERAMERA skrev:Själva skivan ger bidraget J, där J är skivans tröghetsmoment kring rotationsaxeln. Obs detta bidrag är konstant så det försvinner då du deriverar.
Sedan får du ett bidrag från skalbaggen som är , där är skalbaggens hastighet.
Så vi har att H= Jw0+r×mv och Jw0=0 pga konstant vinkelhastighet. Men vi har ju fått givet v0 också i frågan? Ska man använda den för att ta reda på skalbaggens hastighet?
Jw0 är konstant så att d(Jw0)/dt = 0.
Ja v0 skall du använda. Men tänk på att du lämpligen använder polära koordinater här. Då gäller , där .
PATENTERAMERA skrev:destiny99 skrev:PATENTERAMERA skrev:Själva skivan ger bidraget J, där J är skivans tröghetsmoment kring rotationsaxeln. Obs detta bidrag är konstant så det försvinner då du deriverar.
Sedan får du ett bidrag från skalbaggen som är , där är skalbaggens hastighet.
Så vi har att H= Jw0+r×mv och Jw0=0 pga konstant vinkelhastighet. Men vi har ju fått givet v0 också i frågan? Ska man använda den för att ta reda på skalbaggens hastighet?
Jw0 är konstant så att d(Jw0)/dt = 0.
Ja v0 skall du använda. Men tänk på att du lämpligen använder polära koordinater här. Då gäller , där .
Men det här med polära koordinater hänger jag inte med. Är det dynamiken igen? För jag ser inte hur det blir som du skrev.
Det är väl egentligen kinematiken. Kolla upp formlerna i din bok, kanske kallar man det cylinderkoordinater istället för polära koordinater.
PATENTERAMERA skrev:Det är väl egentligen kinematiken. Kolla upp formlerna i din bok, kanske kallar man det cylinderkoordinater istället för polära koordinater.
Ok. Fast jag vet inte vad dina cylindriska eller polära koordinater står för i den uttryck du skriver för v. Men kan absolut leta upp formlerna för både 2D och 3D.
Här är formlerna. vi saknar z prick i formeln för v. Vad stod z prick nu igen? Du skrev btw rprick=v_0 , varför är den det?

z är z-koordinaten som vi kan anse vara noll i detta fall. Dvs den sista termen med z kan vi bortse från här. Plan rörelse.
I vårt fall så är och vinkelhastigheten , allt enligt problemtexten.
PATENTERAMERA skrev:z är z-koordinaten som vi kan anse vara noll i detta fall. Dvs den sista termen med z kan vi bortse från här. Plan rörelse.
I vårt fall så är och vinkelhastigheten , allt enligt problemtexten.
Aa okej så plan rörelse är alltså i 2D där z hastigheten inte behövs eller?
Aa ok då har vi den radiella konstanta hastigheten v0 ?
PATENTERAMERA skrev:Jepp.
Ok så vi ska hitta då vad r×(mv0 er +mrw0eo) blir?
Ja. Tänk på att .
PATENTERAMERA skrev:Ja. Tänk på att .
Aa okej. Vad gör man efter kryssprodukten?
Vi vill använda att .
Du har räknat ut . Så nästa steg blir att derivera map tid.
PATENTERAMERA skrev:Vi vill använda att .
Du har räknat ut . Så nästa steg blir att derivera map tid.
Okej för att få det som Hprick?
Jag har lite svårt med deriveringen här pga flera komponenter.

Jag gjorde kryssprodukten om igen nu och fick detta. Tyvärr går det inte så bra


För fysiken är denna tabell trevlig att lära sig för att beräkna kryssprodukter:
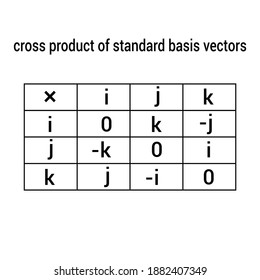 (givet ett högernormerat system)
(givet ett högernormerat system)
PATENTERAMERA skrev:
AI fick samma sak, men jag undrar dock hur det kommer sig att e_r×e_r=0 i ena uttrycket? Samma sak med er×e_0? Jag antar att man behandlar r , v0 och w0 som konstanter när man kryssproduktar er med er och med e0? Jag ser också att du fick ut r^2. Hur fick du fram den?
Se tabellen ovan. Det kommer från definitionen av kryssprodukt. Beloppet av två kryssade vektorer ges av arean av planet de spänner upp. Om det är samma vektor spänner de inte upp något plan så beloppet blir 0.
MrPotatohead skrev:Se tabellen ovan. Det kommer från definitionen av kryssprodukt. Beloppet av två kryssade vektorer ges av arean av planet de spänner upp. Om det är samma vektor spänner de inte upp något plan så beloppet blir 0.
Jag lärde mig jonas månsson kryssprodukten. Där man gör såhär, går det att tillämpa på den också så man ser vad som blir 0 eller inte? Den metoden ska även fungera på alla vektorer i R^3. Enda skillnaden är att vi har nu rer×v0er+rer×rw0e0.
Såhär gjorde han i sin video

utgör alltid en högerorienterad ON-bas.
Det gäller därför att
.
Kryssprodukten mellan två parallella vektorer är alltid noll. Speciellt gäller det därför att , för alla vektorer .
Kolla din lärobok om kryssprodukten. I fysik (tex mekanik) så definierar man oftast kryssprodukten rent geometriskt, istället för algebraiskt. Det är viktigt att känna till och behärska detta när man håller på med fysik.
PATENTERAMERA skrev:Kolla din lärobok om kryssprodukten. I fysik (tex mekanik) så definierar man oftast kryssprodukten rent geometriskt, istället för algebraiskt. Det är viktigt att känna till och behärska detta när man håller på med fysik.
De går tyvärr inte igenom e_r , ez och etheta dvs deras kryssprodukter. Endast när det gäller ex, ey och ez i de första kapitlen. Jag kan skicka vilka sidor jag har tittat detta på. Här är geometriska delen. Vissa saker har säkert gåtts igenom på föreläsningar eller övningar man missat. Får kanske kolla det med kursassistenter och kursare!

Det finns säkert med där man går igenom cylinderkoordinater.
PATENTERAMERA skrev:Det finns säkert med där man går igenom cylinderkoordinater.
Jo det gör det. Men de går inte in på tex er×e0=ez tycker jag. Känns som att man ska på något sätt se det som figuren ovan. Här är en bild jag hittat. Din förklaring i #31 var ju bra i alla fall. Det gav mig lite hjälp på vägen. Tack ändå!

