
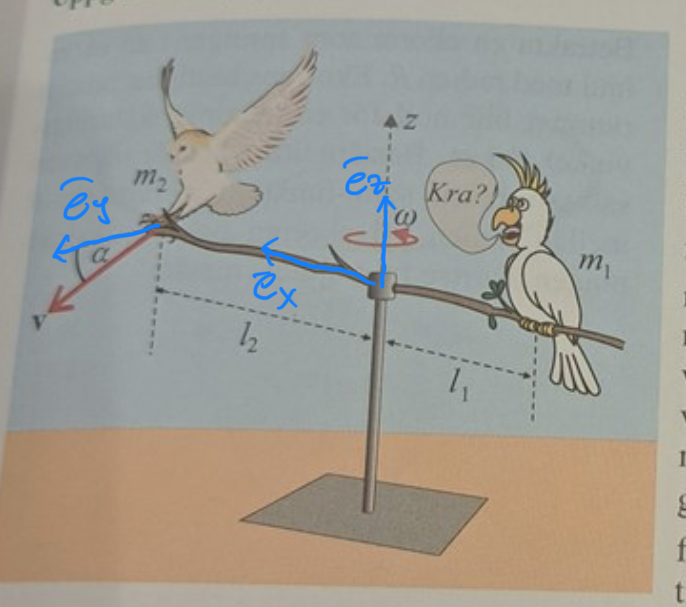
Bestäm sällskapets gemensamma vinkelhastighet

Hej!
Jag fastnade på denna uppgift och det enda jag tänker på här är bevarande av rörelsemängdmomentet, men jag vet inte hur det ska formuleras här.

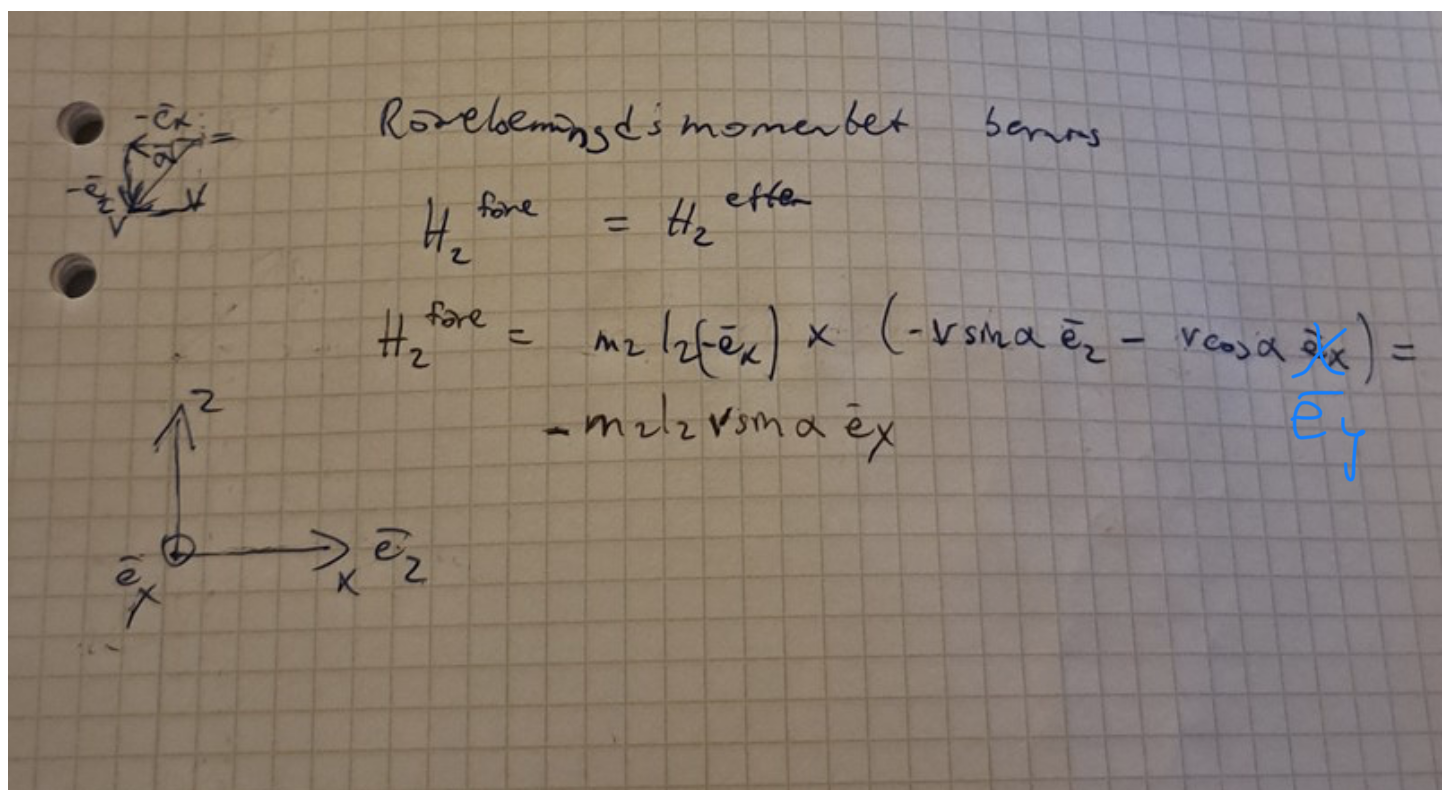
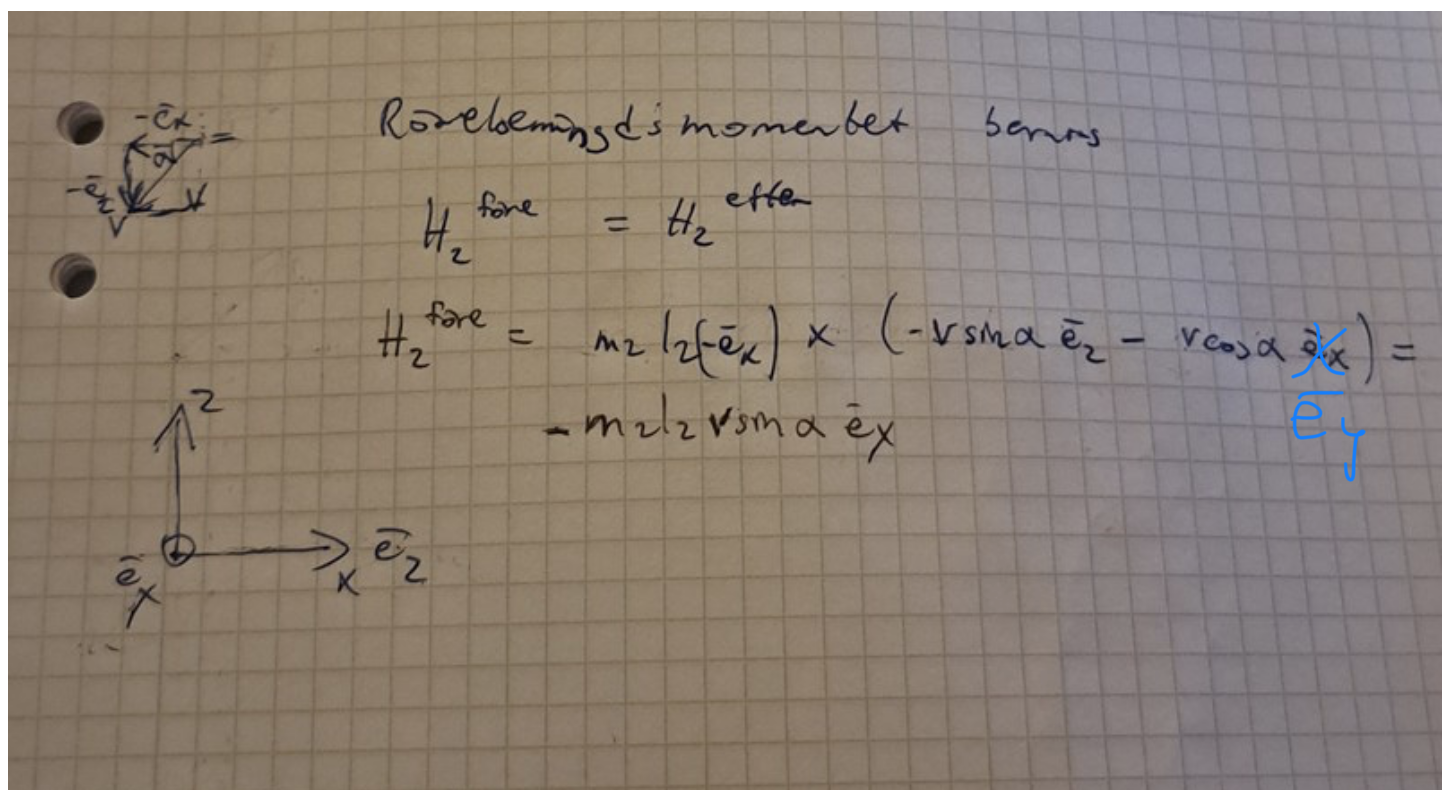
z-komponenten av rörelsemängdsmomentet bevaras.
Lz-före = Lz-efter.
PATENTERAMERA skrev:z-komponenten av rörelsemängdsmomentet bevaras.
Lz-före = Lz-efter.
Ja precis men hur ska man formulera Hz,före resp Hz,efter? Jag har Hz,före=m1l1*0+m2*l2*v. Men vilken hastighet komponent ska man välja? Hur ska man tänka där?
Du kan använda definitionen. Med lämplig val av koordinataxlar.
.
PATENTERAMERA skrev:Du kan använda definitionen. Med lämplig val av koordinataxlar.
.
Fast jag förstår inte hur det kommer sig att vcosalfa är i ey riktning och den andra termen ez riktning?
är upp. är längs l2 i riktning mot ugglan. .
PATENTERAMERA skrev:är upp. är längs l2 i riktning mot ugglan. .
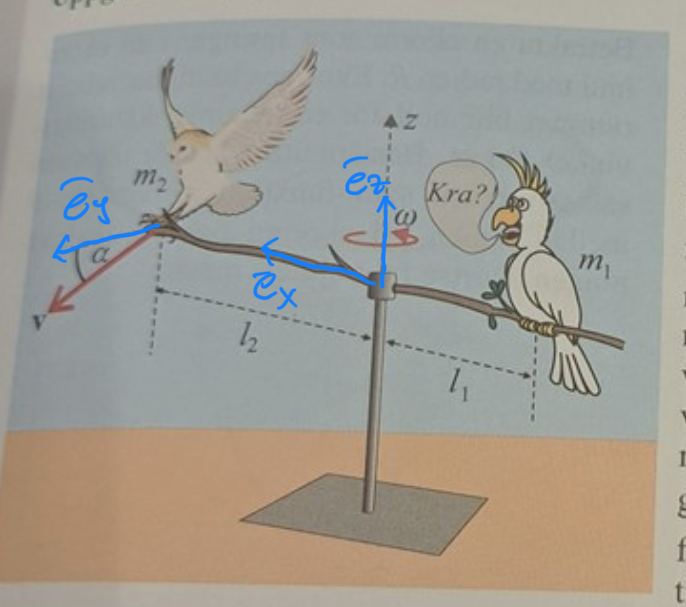
1) ex är väl positiv från origo till höger där papegojan står? ex blir negativ när vi är på negativa x-axeln där ugglan står.
2) Så du har definierat ex till vänster? Papegojan saknar ju hastighet då den är stillastående.
3) jag ser inte ez blir negativ för vsinalfa? Jag får den till positiv?
1. Jag satte ex till vänster. Du kan använda annan konvention, men tänk på att se till att basvektorerna bildar ett högersystem.
2. Papegojan är stilla från början. Korrekt.
3. Ugglans hastighet är snett nedåt. Då blir hastighetens z-komponent negativ eftersom z-axeln är riktad uppåt.
PATENTERAMERA skrev:1. Jag satte ex till vänster. Du kan använda annan konvention, men tänk på att se till att basvektorerna bildar ett högersystem.
2. Papegojan är stilla från början. Korrekt.
3. Ugglans hastighet är snett nedåt. Då blir hastighetens z-komponent negativ eftersom z-axeln är riktad uppåt.
Ok , men jag valde att sätta ex till höger här. Mitt svar blir i alla fall såhär. Jag kanske har missförstått koordinatsystemet som ugglan står på. Trodde det var en och samma hela tiden.

Obs det är bara z-komponenten som bevaras.
PATENTERAMERA skrev:
Ja jag vet. Jag rättade till detta sen efter att ha insett att vi har ey om jag valde ex i höger sida. Högerhandsregeln visar att ey pekar mot mig vilket är att den pekar ut ur skärmen. Jag tänker om vi definierar "ut ur skärmen " som positiv enligt koordinatsystemet jag valde med ex åt höger och ez uppåt så blir ju ey positiv men då får vi något som -m2l2vcosalfa/(m1l1^2+m2l2^2)=w trots att facit har samma svar men positivt tecken, ska man ta abs för att få positivt? Att ta abs på w var AI:s ide för att vi bara bryr oss om storleken i uppgiften.
PATENTERAMERA skrev:Obs det är bara z-komponenten som bevaras.
Ja så sa AI också, men jag undrar varför och vad tanken med det är?
Därför att Mz = 0. Ekipaget kan rotera fritt kring z-axeln.
PATENTERAMERA skrev:Därför att Mz = 0. Ekipaget kan rotera fritt kring z-axeln.
Ok. Vad betyder Ekipaget? Menar du systemet med ugglan+papegojan roterar kring z-axeln och rörelsemängdsmomentet sker i z-axeln ?
Ja, precis.
