
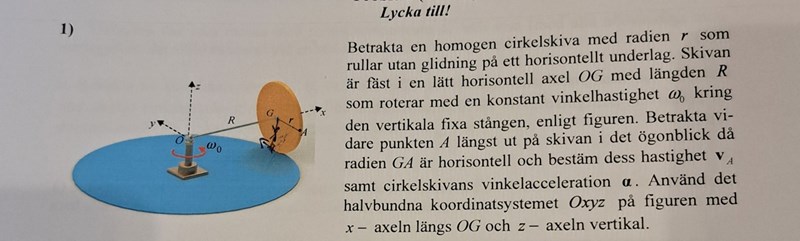
Bestäm v_A samt cirkelskivans vinkelhastighet
Hej!
Jag fick fel på v_A samt vinkelaccelerationen för B och jag vet ej riktigt varför. Jag trodde uppgiften syftade på cirkelskivans egna vinkelhastighet kring G och inte den runt axeln OG.

Du kan se skivans vinkelhastighet som xyz-systemets vinkelacceleration plus skivans vinkelacceleration relativt xyz-systemet.
. Du bestämmer genom att kräva att .
PATENTERAMERA skrev:Du kan se skivans vinkelhastighet som xyz-systemets vinkelacceleration plus skivans vinkelacceleration relativt xyz-systemet.
. Du bestämmer genom att kräva att .
Jag förstår ej riktigt denna uppdelning av w_G
Det är en sats om addition av vinkelhasigheter.
PATENTERAMERA skrev:Det är en sats om addition av vinkelhasigheter.
Ja den känner jag till. w2,0=w1,0+w2,1
Ja, det är det jag använder.
PATENTERAMERA skrev:Ja, det är det jag använder.
Jag ser dock inte hur du använder den. Vi söker skivans vinkelhastighet relativt det fixa systemet xyz och då vet vi att w1,0=w0ez dvs systemets vinkelhastighet och skivans vinkelhastighet relativt G w2,1= w'ex
Skivans vinkelhastighet (relativt ett fixt system) är vinkelhastigheten hos xyz-systemet () plus skivans vinkelhastighet relativt xyz-systemet ().
PATENTERAMERA skrev:Skivans vinkelhastighet (relativt ett fixt system) är vinkelhastigheten hos xyz-systemet () plus skivans vinkelhastighet relativt xyz-systemet ().
Hur hittar vi w'ex då?
Gör som du gjorde tidigare utnyttja att vC är noll.
PATENTERAMERA skrev:Gör som du gjorde tidigare utnyttja att vC är noll.
Ok. Varför har man bestämt att vinkelhastighet för skivan är summan av dessa två vinkelhastigheter och inte skivans vinkelhastighet relativt xyz-systemet?
Summan är vinkelhastigheten relativt ett fixt (inertialt) system. När man bara säger vinkelhastigheten så brukar man mena vinkelhastigheten relativt ett fixt system. Det som GPT:n kallar absoluta vinkelhastigheten.
PATENTERAMERA skrev:Summan är vinkelhastigheten relativt ett fixt (inertialt) system. När man bara säger vinkelhastigheten så brukar man mena vinkelhastigheten relativt ett fixt system. Det som GPT:n kallar absoluta vinkelhastigheten.
Ja ok. Är det alltid såhär för en cirkelskiva? Hur hade det varit om koordinatsystemet exakt låg centrerad i G med z-axeln uppåt osv?
Ett sådant koordinatsystem har samma absoluta vinkelhastighet som xyz-systemet.
PATENTERAMERA skrev:Ett sådant koordinatsystem har samma absoluta vinkelhastighet som xyz-systemet.
Då menar du alltså att skivans absoluta vinkelhastighet blir samma som vinkelhastigjet för xyz-systemet?
Nej, ett koordinatsystem med origo i G, men axlar parallella med xyz-systemet har samma (absoluta) vinkelhastighet som xyz-systemet.
PATENTERAMERA skrev:Nej, ett koordinatsystem med origo i G, men axlar parallella med xyz-systemet har samma (absoluta) vinkelhastighet som xyz-systemet.
Jag menar att koordinatsystemet xyz i figuren har flyttats till G istället så at origo börjar där. Hur blir det för skivans vinkelhastighet?
Eftersom det nya xyz-systemet har samma vinkelhastighet som det gamla så blir uppdelningen av skivans absoluta vinkelhastighet den samma.
PATENTERAMERA skrev:Eftersom det nya xyz-systemet har samma vinkelhastighet som det gamla så blir uppdelningen av skivans absoluta vinkelhastighet den samma.
Ok. Så det blir som i #2? Hur får man alfa_g? Kan man använda accelerationssambandet?
Enklast är att derivera.
.
PATENTERAMERA skrev:Enklast är att derivera.
.
Hur hanterar man w_g(ring) med ez och ex?
Ring är derivatan relativt det roterande systemet xyz. Sett från detta systems horisont så är vektorerna ex och ez konstanta, så ring-derivatan blir noll i detta fall.
PATENTERAMERA skrev:Ring är derivatan relativt det roterande systemet xyz. Sett från detta systems horisont så är vektorerna ex och ez konstanta, så ring-derivatan blir noll i detta fall.
Oj varför är ex och ez konstanta? Varför blir ringderivatan 0? Tänker man att ez, ex och ey i det fixa systemet roterar med xyz systemet vilket de annars gör i det primmade systemet?
De är ju basvektorer i det roterande systemet.
Om du har en vektor uttryckt i denna bas . Då definieras ringderivatan som . Dvs man deriverar som om basvektorerna var konstanta. Sett av en person som följer med xyz-systemet så framstår de som konstanta.
PATENTERAMERA skrev:De är ju basvektorer i det roterande systemet.
Om du har en vektor uttryckt i denna bas . Då definieras ringderivatan som . Dvs man deriverar som om basvektorerna var konstanta. Sett av en person som följer med xyz-systemet så framstår de som konstanta.
Vad är det roterande systemet här ? Är det vår xyz eller det primmade? när anser man basvektorerna som icke konstanta när man ska derivera dem?
xyz-systemet. Något primmat system har vi inte infört.
PATENTERAMERA skrev:xyz-systemet. Något primmat system har vi inte infört.
Ok. Jag trodde inte att xyz systemet roterade riktigt förutom att de säger axeln roterar med den där givna vinkelhastigheten w0. Men när ska man tänka på att derivera enhetsvektorerna eller inte?
Jo, xyz-systemet roterar så att x-axeln alltid är parallell med OG. Eftersom vektorerna är basvektorer i det roterande xyz-systemet så skall man se dem som konstanta när man använder ring-derivatan, dvs derivatan relativt det roterande xyz-systemet.
PATENTERAMERA skrev:Jo, xyz-systemet roterar så att x-axeln alltid är parallell med OG. Eftersom vektorerna är basvektorer i det roterande xyz-systemet så skall man se dem som konstanta när man använder ring-derivatan, dvs derivatan relativt det roterande xyz-systemet.
Är det alltid så att xyz systemet roterar i detta fall eller gäller det andra fall också då vi har även primmade system givet? Vad innebär att vektorerna är basvektorer i det roterande sys?
De är enhetsvektorer som hela tiden är riktade längs respektive koordinataxel.
Du kan ha flera olika koordinatsystem som alla roterar med olika vinkelhastigheter. Man måste läsa vad som gäller för varje uppgift separat. Det går inte att säga något generellt.
PATENTERAMERA skrev:De är enhetsvektorer som hela tiden är riktade längs respektive koordinataxel.
Du kan ha flera olika koordinatsystem som alla roterar med olika vinkelhastigheter. Man måste läsa vad som gäller för varje uppgift separat. Det går inte att säga något generellt.
Ja ok. Så du menar att enhetsvektorerna ska man ej behöva derivera i ringfallet? Men man kanske behöver göra det i prickfallet
Ja, de rör sig ju relativt ett fixt system (i alla fall ex och ey).
PATENTERAMERA skrev:Ja, de rör sig ju relativt ett fixt system (i alla fall ex och ey).
Aa ok. Men hur resonerar man i prickfallet då när det gäller ex, ey och ez? Varför deriveras dem då?
ex och ey ändrar ju sina riktningar i ett fixt system så deras derivator (prick) blir då skilda från noll.
PATENTERAMERA skrev:ex och ey ändrar ju sina riktningar i ett fixt system så deras derivator (prick) blir då skilda från noll.
Okej men hur vet jag när sånt gäller tex i denna uppgift där man söker efter vinkelaccelerationen hos skivan samt vinkelhastigheten och v_A? Vad känns enklast att göra här?
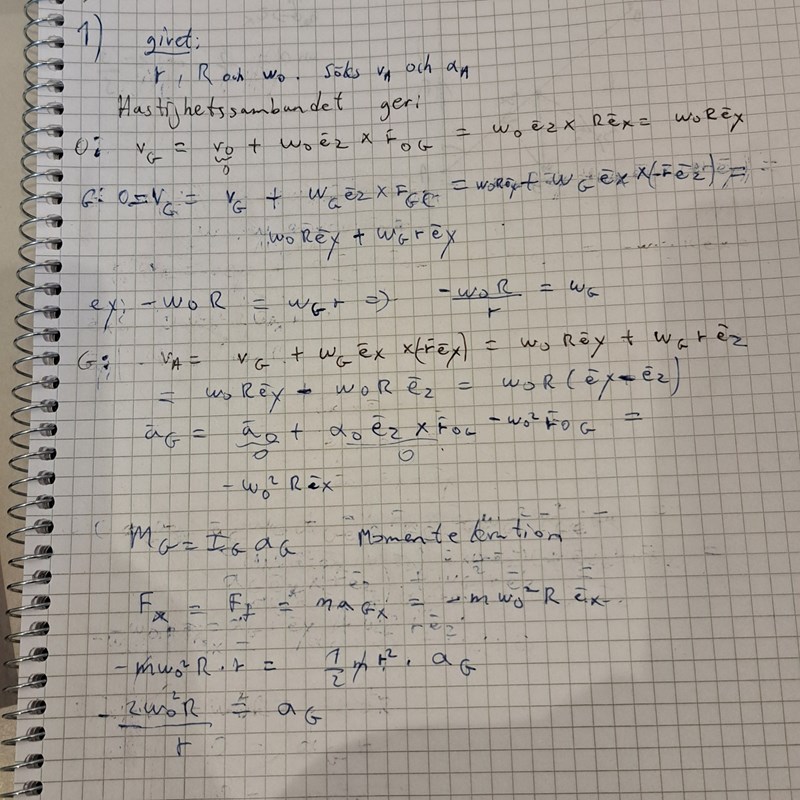
1) Vi insåg att skivans absoluta vinkelhastighet var xyz-systemets vinkelhastighet plus skivans vinkelhastighet relativt xyz-systemet. Enligt satsen om addition av vinkelhastigheter.
2) Vi räknar ut vG.
3) Vi räknar ut skivans vinkelhastighet relativt xyz-systemet med utnyttjande av att skivans hastighet i C skall vara noll om skivan rullar utan glidning.
4) Vi räknar vA med hjälp av sambandsformlerna för hastigheter.
5) Vi räknar ut alfa genom derivering där vi utnyttjar sambandet mellan derivata i fixt system och derivata i roterande xyz-systemet.
PATENTERAMERA skrev:1) Vi insåg att skivans absoluta vinkelhastighet var xyz-systemets vinkelhastighet plus skivans vinkelhastighet relativt xyz-systemet. Enligt satsen om addition av vinkelhastigheter.
2) Vi räknar ut vG.
3) Vi räknar ut skivans vinkelhastighet relativt xyz-systemet med utnyttjande av att skivans hastighet i C skall vara noll om skivan rullar utan glidning.
4) Vi räknar vA med hjälp av sambandsformlerna för hastigheter.
5) Vi räknar ut alfa genom derivering där vi utnyttjar sambandet mellan derivata i fixt system och derivata i roterande xyz-systemet.
Ok. Men du har ej svarat på min fråga när derivatan av enhetsvektorerna gäller?
Kan du specificera frågan? Vet inte riktigt vad du är ute efter.
PATENTERAMERA skrev:Kan du specificera frågan? Vet inte riktigt vad du är ute efter.
#35. Hur vet man när dessa gäller?
Tex har vi
.
PATENTERAMERA skrev:Tex har vi
.
I denna uppgift ska man alltså inte tänka på att derivera ex,ey och ez? varför är e_ring =0?
Ring indikerar derivatan relativt det roterande koordinatsystemet (xyz). Eftersom tex ex är en av basvektorerna i detta system så blir ring-derivatan per definition 0. Se definitionen i #25.
Så här skriver tex GPT.
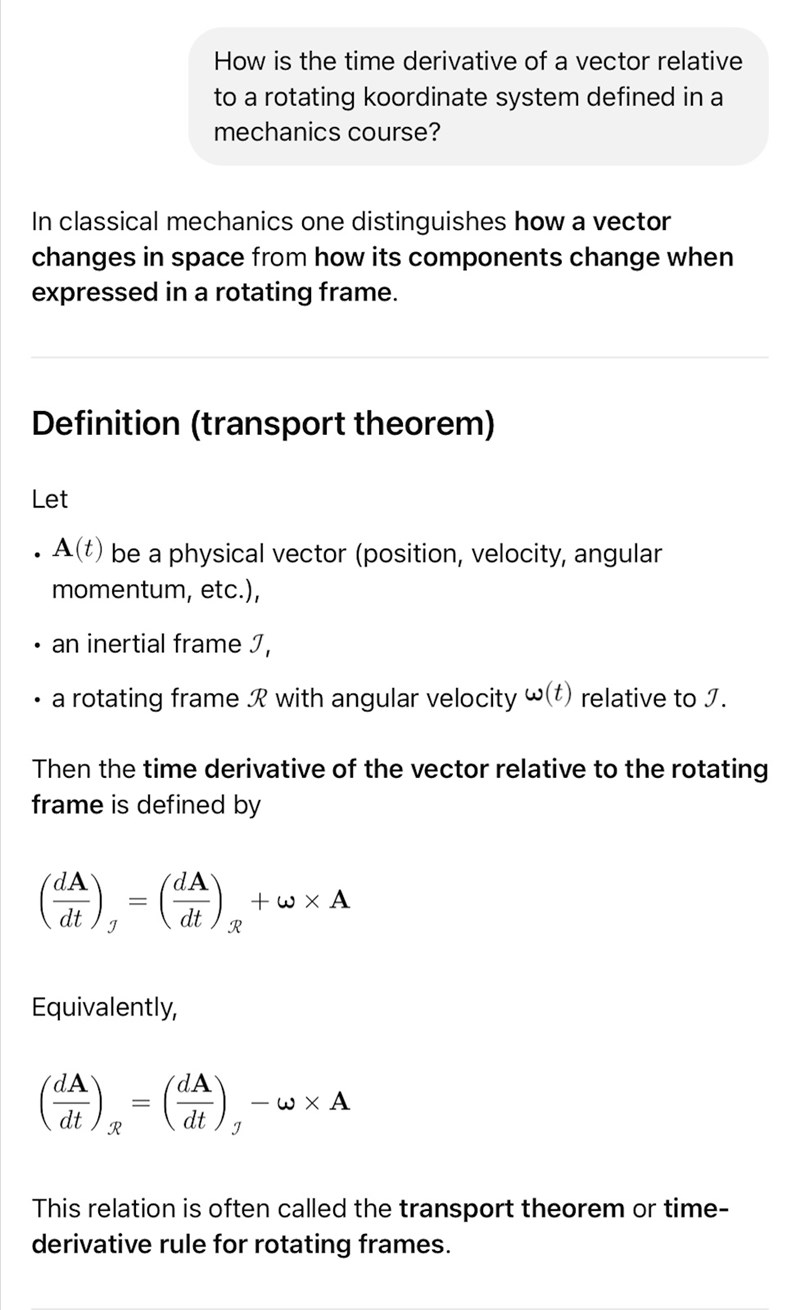
 Här indikerar R det roterande koordinatsystemet och I ett fixt (inertialt) koordinatsystem.
Här indikerar R det roterande koordinatsystemet och I ett fixt (inertialt) koordinatsystem.
PATENTERAMERA skrev:ex och ey ändrar ju sina riktningar i ett fixt system så deras derivator (prick) blir då skilda från noll.
Så man ska alltid komma ihåg att prickderivatan är skild från 0 när basvektorerna är i ett fixt system xyz medan derivatan i det roterande system (xyz igen) så är dessa konstanta och blir då 0.
Ja, basvektorerna i xyz (som roterar med i xyz-systemet) har normalt en nollskild derivata i det fixa systemet.
PATENTERAMERA skrev:Ja, basvektorerna i xyz (som roterar med i xyz-systemet) har normalt en nollskild derivata i det fixa systemet.
Ok. Så derivatan relativt det roterande systemet så är basvektorerna konstanta och typ roterar ej med det fixa systemet, alltså är deras ringderivata lika med 0?
PATENTERAMERA skrev:Enklast är att derivera.
.
Du är ej säker på att vi ska derivera enhetsvektorerna ?
Ringderivatan blir noll i detta fall så du behöver bara beräkna termen med kryssprodukten.
PATENTERAMERA skrev:Ringderivatan blir noll i detta fall så du behöver bara beräkna termen med kryssprodukten.
Ok.
