
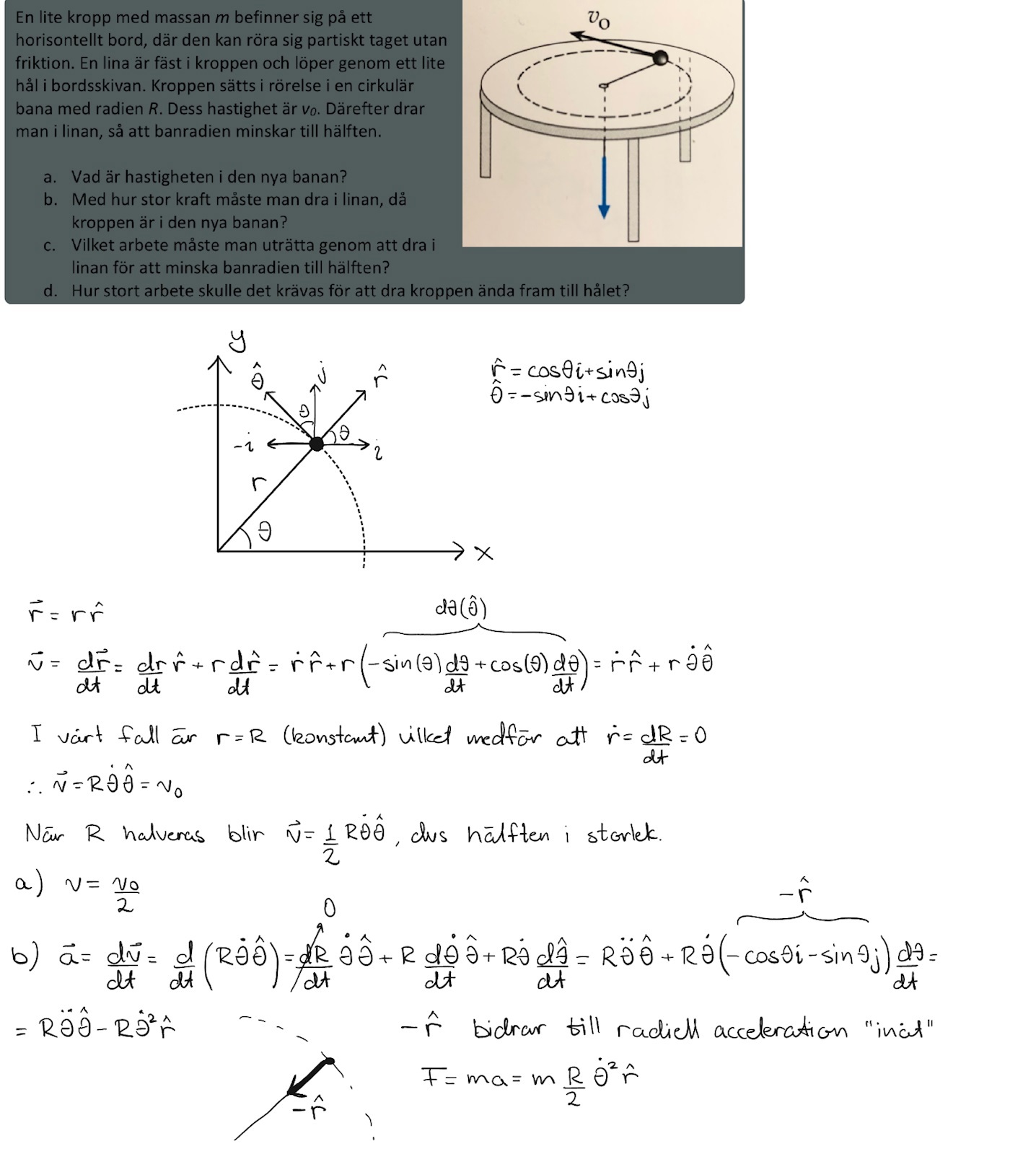
Cirkulär rörelse, polära koordinater.
Till uppgift b, har jag formulerat det korrekt? Har beräknat accelerationen, kraft är massa gånger acceleration. Så jag satt ihop det helt enkelt. Är det rätt resonerat i a uppgiften?

På a) gör du misstaget att tro att är konstant. Vinkelhastigheten kommer att öka då radien minskar. Tänk ”isprinsessa”.
.
Kryssmultiplicera båda led med .
, vilket implicerar att = konstant.
Om du kombinerar ovanstående med formeln för hastigheten så kan du visa att = konstant.
Således har vi att . Vilket ger att , som i sin tur ger att .
PATENTERAMERA skrev:På a) gör du misstaget att tro att är konstant. Vinkelhastigheten kommer att öka då radien minskar. Tänk ”isprinsessa”.
.
Kryssmultiplicera båda led med .
Jag känner inte igen detta. Men jag vet att samt att (kraftmoment)
Edit: Fr står r för radiell antar jag? ska inte då
Jag visste inte om ni gått igenom rörelsemängdsmoment. Men detta är precis samma tankegång om du tänker efter. Dvs vi har att rörelsemängdsmomentet är konstant, eftersom momentet är noll. .
Du kan definiera kraften på båda sätt det kommer bara skilja på vilket tecken du får på Fr. Men du måste komma i håg vilken definition du valt och vara konsekvent.
PATENTERAMERA skrev:Jag visste inte om ni gått igenom rörelsemängdsmoment. Men detta är precis samma tankegång om du tänker efter. Dvs vi har att rörelsemängdsmomentet är konstant, eftersom momentet är noll. .
Du kan definiera kraften på båda sätt det kommer bara skilja på vilket tecken du får på Fr. Men du måste komma i håg vilken definition du valt och vara konsekvent.
Vi har läst om angular momentum vilket jag förstår är rörelsemängdsmoment.
Om jag studerar formeln , vilket går bra då kroppen och "hävarmen" är vinkelräta så får vi så ser jag att om radien minskar så måste vinkelhastigheten öka för att kompensera.
Men för att visa detta matematisk så skrev du i #1 att jag skulle kombinera och uttrycket för vinkelhastighet i polära koordinater. Det känns som det är över min förmåga just nu, jag vet inte hur jag ska gå vidare.
Du har att .
Då har vi att .
Så om skall vara konstant så måste vara konstant. Frågor på det?
Om du vet att L = mvr är konstant så har du att.
mv(R/2) = mv0R. Vilket ger att v = 2v0. Så du har svaret på a.
PATENTERAMERA skrev:Jag visste inte om ni gått igenom rörelsemängdsmoment. Men detta är precis samma tankegång om du tänker efter. Dvs vi har att rörelsemängdsmomentet är konstant, eftersom momentet är noll.
Jag är lite osäker varför rörelsemängdsmomentet är konstant. Korrigera mig gärna om jag tänker fel,
Vi har att (konstant, såvidare vi inte ändrar R)
Momentet är , då L är konstant.
Varför måste vi ta fram momentet för att visa att L är konstant?

Cien skrev:Jag är lite osäker varför rörelsemängdsmomentet är konstant.
För att situationen är cirkulärt symmetriskt. Då följer det ur Noethers teorem.
Cien skrev:PATENTERAMERA skrev:Jag visste inte om ni gått igenom rörelsemängdsmoment. Men detta är precis samma tankegång om du tänker efter. Dvs vi har att rörelsemängdsmomentet är konstant, eftersom momentet är noll.
Jag är lite osäker varför rörelsemängdsmomentet är konstant. Korrigera mig gärna om jag tänker fel,
Vi har att (konstant, såvidare vi inte ändrar R)
Momentet är , då L är konstant.
Varför måste vi ta fram momentet för att visa att L är konstant?
Rörelsemängdsmomentet är kopplat till kraftmomentet enligt
. Det står säkert någonstans i kursboken.
I detta fall så är så är , och därför är konstant.
PATENTERAMERA skrev:Cien skrev:PATENTERAMERA skrev:Jag visste inte om ni gått igenom rörelsemängdsmoment. Men detta är precis samma tankegång om du tänker efter. Dvs vi har att rörelsemängdsmomentet är konstant, eftersom momentet är noll.
Jag är lite osäker varför rörelsemängdsmomentet är konstant. Korrigera mig gärna om jag tänker fel,
Vi har att (konstant, såvidare vi inte ändrar R)
Momentet är , då L är konstant.
Varför måste vi ta fram momentet för att visa att L är konstant?
Rörelsemängdsmomentet är kopplat till kraftmomentet enligt
. Det står säkert någonstans i kursboken.
I detta fall så är så är , och därför är konstant.
Är det korrekt att resonera som så att eftersom den tangentiella hastigheten är konstant så finns det därför ingen tangentiell acceleration och därmed blir kraftmomentet m*at=m*0
Cien skrev:Är det korrekt att resonera som så att eftersom den tangentiella hastigheten är konstant
Du ska inte bara anta att den tangentiella hastigheten är konstant. Det var ju delfråga a).
Pieter Kuiper skrev:Cien skrev:Är det korrekt att resonera som så att eftersom den tangentiella hastigheten är konstant
Du ska inte bara anta att den tangentiella hastigheten är konstant. Det var ju delfråga a).
Om den tangentiella hastigheten inte är konstant så måste det väl finnas tan. acceleration? om det finns acceleration ger det upphov till en kraft -> då finns det kraftmoment?
Som Pieter säger, den tangentiella hastigheten är inte konstant.
. Men vi visade att var konstant. Detta innebär att vi har att
.
Som inte är konstant eftersom radien r minskar från R till R/2.
Cien skrev:Om den tangentiella hastigheten inte är konstant så måste det väl finnas tan. acceleration? om det finns acceleration ger det upphov till en kraft -> då finns det kraftmoment?
Det finns Corioliskraften när kroppen rör sig mot mitten. Men att försöka räkna med det ställer bara till det i onödan, eftersom den radiella hastigheten inte är given och inte spelar någon roll för svaren.
Cien skrev:Pieter Kuiper skrev:Cien skrev:Är det korrekt att resonera som så att eftersom den tangentiella hastigheten är konstant
Du ska inte bara anta att den tangentiella hastigheten är konstant. Det var ju delfråga a).
Om den tangentiella hastigheten inte är konstant så måste det väl finnas tan. acceleration? om det finns acceleration ger det upphov till en kraft -> då finns det kraftmoment?
Du blandar i hop det med det fall att du rör dig i en cirkel, dvs r = konstant. I det fallet så gäller det att
, så om är konstant så måste vi ha att - ingen kraft i tangentiell led.
Men nu är r inte konstant och då kan man visa (gör det) att följande gäller
.
Vad händer nu om kraften i tangentiell led är 0. Jo vi får att
.
Så om radien inte är konstant så är noll endast i det fall att vinkelhastigheten är noll.
Vidare ser vi att
.
Så återigen ser vi att om så måste det gälla att = konstant.
PATENTERAMERA skrev:Cien skrev:Pieter Kuiper skrev:Cien skrev:Är det korrekt att resonera som så att eftersom den tangentiella hastigheten är konstant
Du ska inte bara anta att den tangentiella hastigheten är konstant. Det var ju delfråga a).
Om den tangentiella hastigheten inte är konstant så måste det väl finnas tan. acceleration? om det finns acceleration ger det upphov till en kraft -> då finns det kraftmoment?
Du blandar i hop det med det fall att du rör dig i en cirkel, dvs r = konstant. I det fallet så gäller det att
, så om är konstant så måste vi ha att - ingen kraft i tangentiell led.
Men nu är r inte konstant och då kan man visa (gör det) att följande gäller
.
Förstår inte riktigt det som står innanför parantesen. Första termen är en vektor, andra en skalär. Saknas det möjligtvis enhetsvektorn i den andra termen?
, dvs en skalär. Hastighetens komponent i -riktningen.
PATENTERAMERA skrev:, dvs en skalär. Hastighetens komponent i -riktningen.
Okej jag deriverar och får , detta var första termen inom parantesen. Adderar detta med .
Alltså
Ja, det ser ut att stämma.
PATENTERAMERA skrev:Ja, det ser ut att stämma.
Om jag förstår rätt så är , men förstår inte riktigt var kommer ifrån. Jag vet att du sa att man måste göra så då radien inte är konstant men som sagt för känns det ganska trivialt men inte för den andra termen
Nja, , dvs är accelerationens komponent i -riktningen.
Det gäller att .

För utökad förståelse kan man fundera över en intressant twist; istället för att dra i tråden kan man låta den lindas upp runt ett mycket tunt stift i centrum. Vad blir då partikelns fart när banradien minskat till ?
D4NIEL skrev:För utökad förståelse kan man fundera över en intressant twist; istället för att dra i tråden kan man låta den lindas upp runt ett mycket tunt stift i centrum. Vad blir då partikelns fart när banradien minskat till ?
farten fördubblas.
Ville gärna lära mig lösa problemet med polära koordinater.
Annars kan man tänkte att rörelsemängden bevaras då det inte finns några externa krafter på systemet.
Så mv0R=mvR/2 => v=2vo
Nja, det blir en väsentlig skillnad mellan att dra i tråden och att låta den masslösa tråden lindas upp kring ett (nästan) oändligt tunt stift.
(Men fokusera på en sak i taget, så tar vi energiresonemangen sen)
