
Differentialekvation Mekanik 1
Hej!
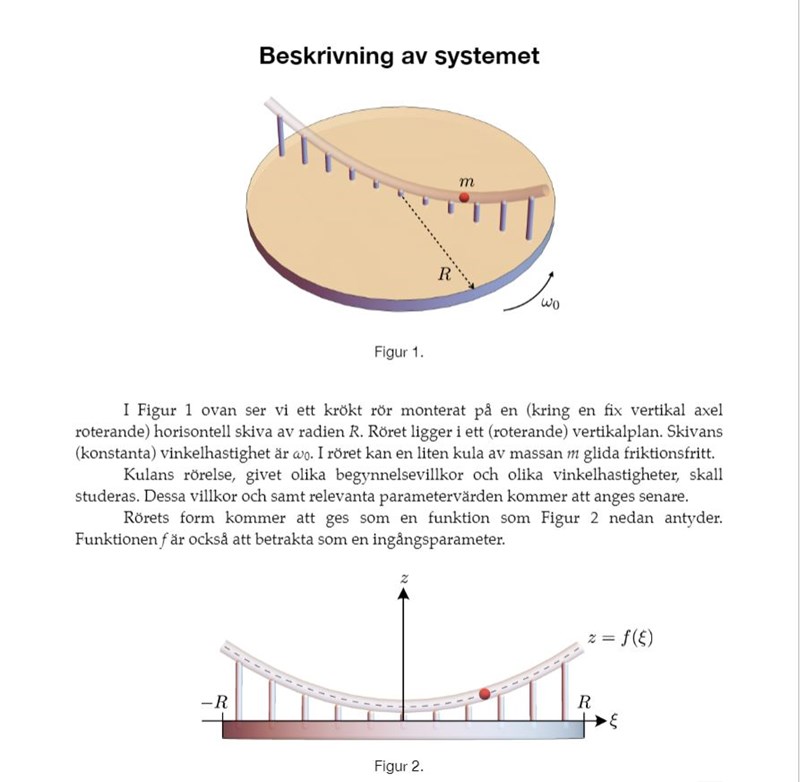
Jag hittade en uppgift i min Mekanik bok och blev väldigt fundersam. Har fått ett problem där man ska ställa upp kulans lägevektor, hastighetsvektor och accelerationsvektor. Sedan skan man även ställa upp en användbar differentialekvation för ξ(t). Jag har absolut ingen aning hur man ska gå tillväga här så om någon har en lösning eller någon hjälp hade det verkligen varit uppskattat.
Står även i uppgiften "Även om differentialekvationen i uppgift 2 ovan inte är lösbar ”med papper och penna” (analytiskt lösbar) så kan man ändå lösa den numeriskt."

Det är oklart vad uppgiften faktiskt är men rörelseekvationen tas nog enklast fram genom att derivera total energi för systemet.
Edit: Annars är antagligen en Lagrangiansk formulering mest lämplig.
Ebola skrev:Det är oklart vad uppgiften faktiskt är men rörelseekvationen tas nog enklast fram genom att derivera total energi för systemet.
Edit: Annars är antagligen en Lagrangiansk formulering mest lämplig.
uppgiften är att ta fram kulans lägesvektor, hastighetsvektor och accelerationsvektor. Man ska även ställa upp en differentialekvation för ξ(t). Har försökt ett antal gånger men vi har endast gjort detta i 2D plan och med lite vägledning. Har aldrig sett något liknande ://

Vilka förkunskaper har du?
Känner du till hur man analyserar rörelse i rörliga koordinatsystem?
Känner du till d’Alemberts princip eller virtuellt arbete?
Känner du till metoden med Lagrange-funktioner?
Känner du till Kanes metod?

PATENTERAMERA skrev:Vilka förkunskaper har du?
Känner du till hur man analyserar rörelse i rörliga koordinatsystem?
Känner du till d’Alemberts princip eller virtuellt arbete?
Känner du till metoden med Lagrange-funktioner?
Känner du till Kanes metod?
Oj vad jag blir suktad.
(Lagrangefunktioner i mekanik1 tror jag inte...)
PATENTERAMERA skrev:Vilka förkunskaper har du?
Känner du till hur man analyserar rörelse i rörliga koordinatsystem?
Känner du till d’Alemberts princip eller virtuellt arbete?
Känner du till metoden med Lagrange-funktioner?
Känner du till Kanes metod?
Att analysera rörelse i koordinatsystem ja, i rörliga koordinatsystem nej. d’Alemberts formel ser mycket bekant ut och har gjort mycket liknande. Resterande har jag inte sett. Med den lilla förkunskaper jag sitter på ska vi ha tillräckligt för att beräkna det de vill veta.
Jag tror att du bör ta dig en funderare på vad som händer innan du börjar räkna, i så fall. Så att du får en känsla för hur du ska ställa upp differentialekvationen.
- Hur skulle du göra om den inte roterade?
- Vad händer om du beskriver rörelsen för ett koordinatsystem som följer med rotationen?
- Hur skiljer sig detta från ett inertialsystem?
- Vad händer om funktionen är (om röret alltså bara ligger plant på disken)?
Du kan läsa denna länk för intuition:
Particle gently kept on a frictionless groove
När det kommer till vektorbeskrivningen sedan rör det sig i min mening enbart om att använda Newton-Eulers ekvationer i cylindriska koordinater men jag kan ha fel.
Börja med att införa ett fixt koordinatsystem med koordinater x, y och z.
Hur uttrycker du koordinaterna i detta fixa koordinatsystem för en punkt som har koordinaterna () i det koordinatsystem som följer med skivan?
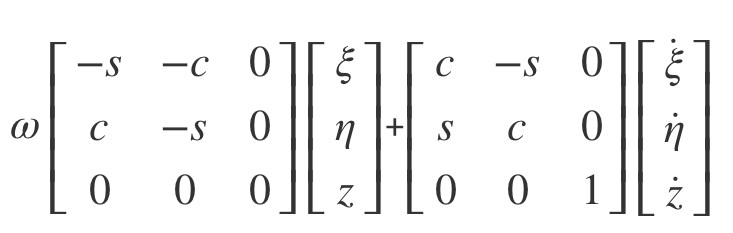
(x, y, z) = (cos, sin, 0) + (-sin, cos, 0) + z(0, 0, 1), eller med matriser
= .
Där c = cos och s = sin.
= == +
PATENTERAMERA skrev:Börja med att införa ett fixt koordinatsystem med koordinater x, y och z.
Hur uttrycker du koordinaterna i detta fixa koordinatsystem för en punkt som har koordinaterna () i det koordinatsystem som följer med skivan?
(x, y, z) = (cos, sin, 0) + (-sin, cos, 0) + z(0, 0, 1), eller med matriser
= .
Där c = cos och s = sin.
hmmm...
Lägesvektor bör väl isåfall vara r(t) = ξ (cosωt, sinωt, 0) + η(-sinωt, cosωt, 0) + z(0, 0, f(ξ))? man får fram hur mycket skivan vridits + att man ser vart kulan befinner sig höhdmässigt. Isåfall är väl v(t) = r'(t) och a(t) = v'(t) om jag förstår korrekt?
EDIT: eller hmmm det kanske inte funkar så nej... om ex z = 1 skulle det kunna vara på ena eller andra sidan... Var också lite fundersam i formeln, varför -sin istället för sin?
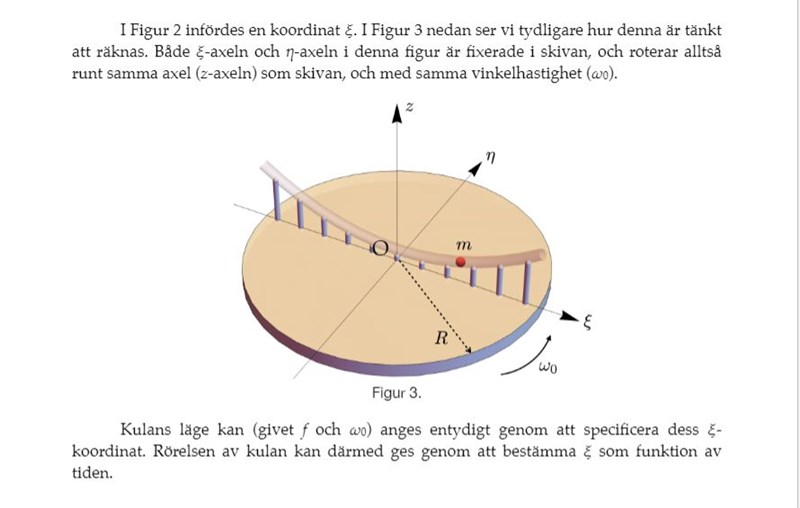
Tänkte vara lite allmän i början. Sedan har vi speciellt att = 0 och att z = f() i vårat problem. Men jag tänkte att det kan man införa senare när man har tagit fram generella formler, som en övning.
Tänk så här. Sätt alla koordinater (i det roterande koordinatsystemet) till noll utom tex . Hur bör formeln se ut då? Upprepa för de andra koordinaterna.
PATENTERAMERA skrev:= == +
Då hade jag tänkt rätt där iallafall. Om jag sedan vill få ut a(t) är det väl bara att derivera det nya uttrycket?
Ja. Det kan även vara värt att ta en titt på hur vektorernas komponenter ser ut i det roterande koordinatsystemet.
Tex om vi vill se vilka komponenterna hos hastighetsvektorn blir i det roterande koordinatsystemet så kan vi beräkna det enligt
= = =...= .
Så mycket enklare uttryck.
PATENTERAMERA skrev:Ja. Det kan även vara värt att ta en titt på hur vektorernas komponenter ser ut i det roterande koordinatsystemet.
Tex om vi vill se vilka komponenterna hos hastighetsvektorn blir i det roterande koordinatsystemet så kan vi beräkna det enligt
= = =...= .
Så mycket enklare uttryck.
Nu hänger jag nog inte riktigt med på hur du menar eller vad du gjorde.
OK om du har två kartesiska koordinatsystem så transformeras vektorers komponenter på samma sätt som koordinaterna.
Tex om vi har en vektor u så kan denna vektor beskrivas med komponenter relativt x/y/z-systemet eller relativt -systemet. Transformationen är den samma som för koordinaterna, dvs
, och vi kan invertera detta uttryck och får då
Sedan tillämpar jag helt enkelt denna formel på hastighetsvektorn, som alltså har ett mycket enklare utseende i det roterande koordinatsystemet.
PATENTERAMERA skrev:OK om du har två kartesiska koordinatsystem så transformeras vektorers komponenter på samma sätt som koordinaterna.
Tex om vi har en vektor u så kan denna vektor beskrivas med komponenter relativt x/y/z-systemet eller relativt -systemet. Transformationen är den samma som för koordinaterna, dvs
, och vi kan invertera detta uttryck och får då
Sedan tillämpar jag helt enkelt denna formel på hastighetsvektorn, som alltså har ett mycket enklare utseende i det roterande koordinatsystemet.
så att om jag förstår det rätt, det slutliga uttrycket där är hastighetsvektorn v(t) i det rörliga planet? och i så fall varför inverterar man uttrycket istället för att derivera, så som jag trodde att man gick tillväga? Om hastighetsvektorn ser ut sådär, får man inte a(t) genom derivering då heller?
Jo. Du kan räkna ut accelerationen genom derivering. Derivera det uttryck som vi hade tidigare (se nedan). Då får du komponenterna i x/y/z-systemet av accelerationen. Sedan kan du använda transformationslagen som jag visade tidigare för att ta fram accelerationens komponenter i det roterande koordinatsystemet.
PATENTERAMERA skrev:Jo. Du kan räkna ut accelerationen genom derivering. Derivera det uttryck som vi hade tidigare (se nedan). Då får du komponenterna i x/y/z-systemet av accelerationen. Sedan kan du använda transformationslagen som jag visade tidigare för att ta fram accelerationens komponenter i det roterande koordinatsystemet.
tack för all hjälp. det är verkligen uppskattat och ursäkta min okunnighet hehe. Försöker sist att skriva ut r(t), v(t) och a(t) som uttryck för att skriva in i Mathematica, finns det något lätt sätt att göra det? Blir väldigt fel...
Du bör få
= ++.
Vad blir
?
PATENTERAMERA skrev:Du bör få
= ++.
Vad blir
?
Yes, det blir korrekt nu tillslut. Tack så otroligt mycket för hjälpen. Ska inte ta upp mer tid av din kväll så ska försöka lösa resten själv. Tack så mycket!!!
OK.
Efter viss möda fick jag i alla fall fram diffekvationen
.
Hoppas någon annan kan bekräfta.
