
Exempeluppgift med stång och gaffeln


Hej!
Jag förstår inte dessa markerade sakerna jag markerat med grönt.
1) hur kan vo'=-dw1ex' när d pekar i y' riktningen och var kommer minustecknet ifrån?
2) hur får de vrel=-lw0ey' och var kommer minustecknet ifrån?
3) de skriver ett uttryck för ao' där jag inte är med på hur de får det och minustecknet framför också.
4) jag förstår inte det sista uttrycket där de deriverar (1.20)

1) hur kan vo'=-dw1ex' när d pekar i y' riktningen och var kommer minustecknet ifrån?
2) hur får de vrel=-lw0ey' och var kommer minustecknet ifrån?
Båda kommer från att
.
Man kan oxå se i bilden att vid det avbildade läget borde punkterna ha hastighetsvektorer i dessa riktningar.
3) de skriver ett uttryck för ao' där jag inte är med på hur de får det och minustecknet framför också.
Se deras bild och minns att centripetalacceleration är riktad in mot rotationens centrum.
4) jag förstår inte det sista uttrycket där de deriverar (1.20)
Som det talades om i en annan tråd rör sig basvektorerna själva med en hastighet
.
MrPotatohead skrev:
1) hur kan vo'=-dw1ex' när d pekar i y' riktningen och var kommer minustecknet ifrån?
2) hur får de vrel=-lw0ey' och var kommer minustecknet ifrån?
Båda kommer från att
.
Man kan oxå se i bilden att vid det avbildade läget borde punkterna ha hastighetsvektorer i dessa riktningar.
3) de skriver ett uttryck för ao' där jag inte är med på hur de får det och minustecknet framför också.
Se deras bild och minns att centripetalacceleration är riktad in mot rotationens centrum.
4) jag förstår inte det sista uttrycket där de deriverar (1.20)
Som det talades om i en annan tråd rör sig basvektorerna själva med en hastighet
.
Jag tror inte jag förstår deras figur riktigt (den andra bilden alltså) där du menar att punkterna har hastighetsvektorer i dessa riktning? Men gällande v=w×r kanske du menar att d=dey' och w1ez=w1ez' pga ez och ez' är parallella , om man kryssar w1ez' med dey' så får man ju -w1dex' och samma sak gör man med v_rel. Fast jag förstår inte skillnaden mellan dem vo' och vrel , vo' är väl den relativa hastighet i det rörliga systemet där O' rör sig medan den andra hastigheten är den relativa hastighet i någon punkt?
Man brukar väl bestämma först rrel och därifrån bestämma vrek mha derivering.
Centripetalaccelerationen är ju a=v^2/r men förstår inte varför man blandar in den samt hur de får fram den enligt deras resonemang. Varför använder de inte sig av vo' resultatet och deriverar den för att få ao'?
Så om w1 och w2 är konstanta så betyder inte att deras riktningar ez' och ey' är konstanta eftersom w kan ändras vilket påverkar enhetsvektorerna? Jag är lite fundersam över varför d/dt(w1ez' ) blir 0 men inte den andra termen också?

1).
3).
(Obs: boken missar den sista termen. Detta visar hur lätt det är att tappa bort sig när man håller på med roterande system. Intuitionen kan leda en fel.)
Tillägg: 6 sep 2025 17:42
Ha, tror boken har rätt i alla fall, men det är lite subtilt att räkna fram detta stringent. Man måste naturligtvis ta hänsyn till att .
destiny99 skrev:Fast jag förstår inte skillnaden mellan dem vo' och vrel , vo' är väl den relativa hastighet i det rörliga systemet där O' rör sig medan den andra hastigheten är den relativa hastighet i någon punkt?
är hastigheten det primmade systemets origo.
är någon punkts hastighet enligt (alltså relativt) det primmade (rörliga) systemet.
Man brukar väl bestämma först rrel och därifrån bestämma vrek mha derivering.
Det kan man göra som man vill. Antingen använder man färdiga formler eller så härleder man från lägesvektorn som ofta är lätt att skriva ut.
destiny99 skrev:Centripetalaccelerationen är ju a=v^2/r men förstår inte varför man blandar in den samt hur de får fram den enligt deras resonemang. Varför använder de inte sig av vo' resultatet och deriverar den för att få ao'?
Det enda sättet rör sig är med en rotation konstant rotation med konstant radie . Då förstår man att den endast accelererar med centripetalaccelerationen. Man kan skriva ut hela den allmänna formeln (som boken gjort ()) och stryka alla termer som blir , men det är jobbigt.
Så om w1 och w2 är konstanta så betyder inte att deras riktningar ez' och ey' är konstanta eftersom w kan ändras vilket påverkar enhetsvektorerna?
Konstant rotation innebär inte att basvektorerna är konstant. Glöm inte att rotationshastigheten är en tidsderiverad vinkel, inte bara vinkeln i sig. Om roterar med kommer hastigheten av ges av .
Att är konstant innebär att .
PATENTERAMERA skrev:1).
3).
(Obs: boken missar den sista termen. Detta visar hur lätt det är att tappa bort sig när man håller på med roterande system. Intuitionen kan leda en fel.)
Tillägg: 6 sep 2025 17:42
Ha, tror boken har rätt i alla fall, men det är lite subtilt att räkna fram detta stringent. Man måste naturligtvis ta hänsyn till att .
Men varför är inte ez×ey'=-ex ty y' och y ligger på samma axel?
Det är där man måste vara försiktig, och det var därför som jag fick en felaktig extra term på accelerationen.
ez x ey’ blir lika med -ex’ just i det läge som visas i figuren för precis i detta läge så är ez = ez’. Därför gäller det momentant att ez x ey’ = ez’ x ey’ = -ex’.
Korrigerad härledning nedan.
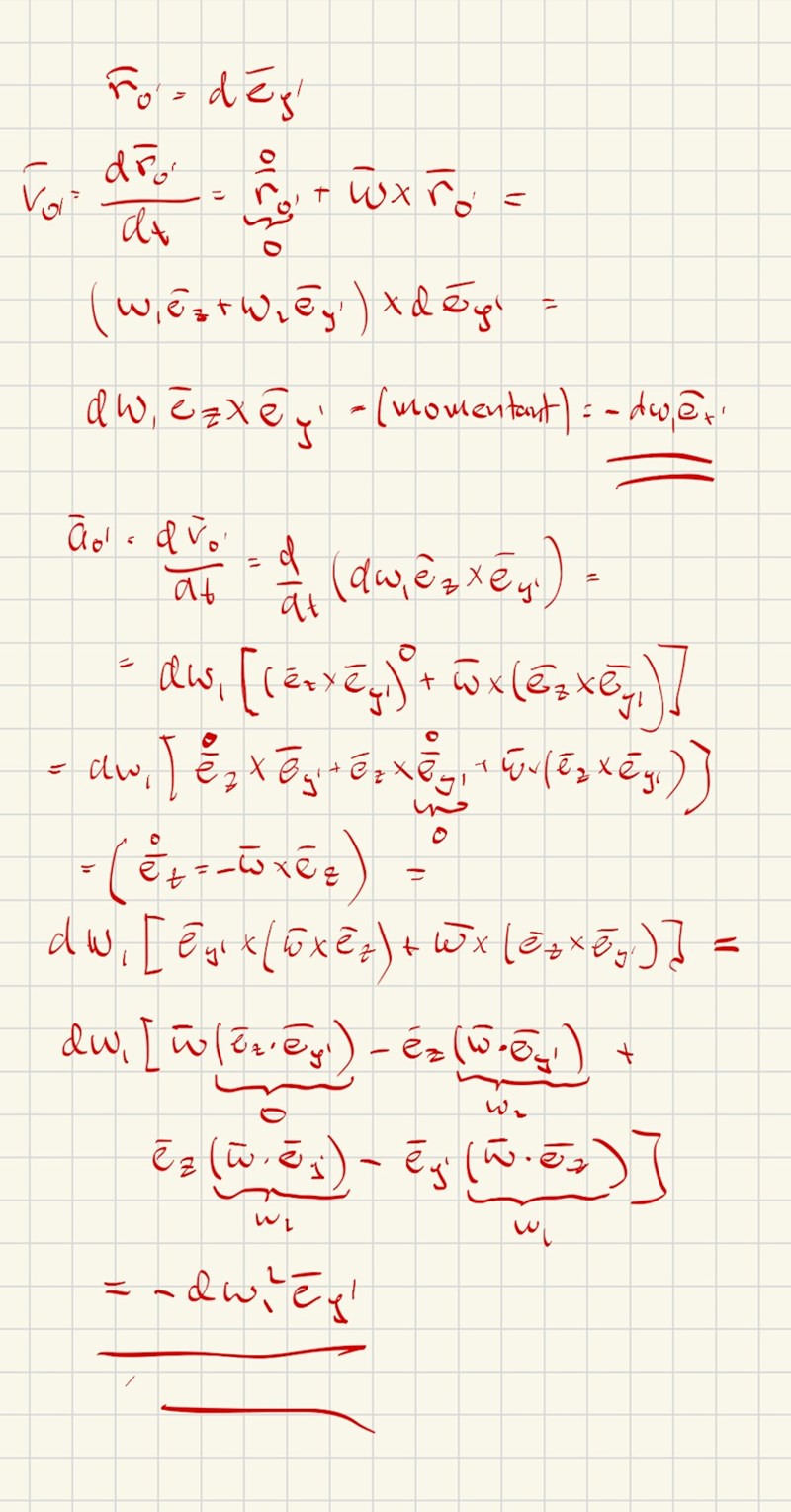
PATENTERAMERA skrev:Det är där man måste vara försiktig, och det var därför som jag fick en felaktig extra term på accelerationen.
ez x ey’ blir lika med -ex’ just i det läge som visas i figuren för precis i detta läge så är ez = ez’. Därför gäller det momentant att ez x ey’ = ez’ x ey’ = -ex’.
Korrigerad härledning nedan.
Men varför är ez=ez' ? Är det för att båda axlarna är parallella ? Men även y' är parallell med y också i den första figuren av uppgiften. Det kanske inte är relevant för just ez iom att man ska kryssa den med ey'
Det står i uppgiften att man ser systemet i ett ögonblick då det råkar gälla.
 Ja, det är för att axlarna (momentant) är parallella.
Ja, det är för att axlarna (momentant) är parallella.
MrPotatohead skrev:destiny99 skrev:Centripetalaccelerationen är ju a=v^2/r men förstår inte varför man blandar in den samt hur de får fram den enligt deras resonemang. Varför använder de inte sig av vo' resultatet och deriverar den för att få ao'?
Det enda sättet rör sig är med en rotation konstant rotation med konstant radie . Då förstår man att den endast accelererar med centripetalaccelerationen. Man kan skriva ut hela den allmänna formeln (som boken gjort ()) och stryka alla termer som blir , men det är jobbigt.
Så om w1 och w2 är konstanta så betyder inte att deras riktningar ez' och ey' är konstanta eftersom w kan ändras vilket påverkar enhetsvektorerna?
Konstant rotation innebär inte att basvektorerna är konstant. Glöm inte att rotationshastigheten är en tidsderiverad vinkel, inte bara vinkeln i sig. Om roterar med kommer hastigheten av ges av .
Att är konstant innebär att .
Att det är centripetalacceleration kommer väl ifrån att uttrycka accelerationen för denna cirkelrörelse i cylindriska koordinater? Om inte så vet jag inte hur man ser intuitivt att det är en centripetalacceleration? Jag förstår att det är en cirkelrörelse med konstant radie.
Centripetalaccelerationen är inte något som dyker upp pga koordinatval. Den kan uttryckas både i kartesiska () och cylindriska () koordinater.
MrPotatohead skrev:Centripetalaccelerationen är inte något som dyker upp pga koordinatval. Den kan uttryckas både i kartesiska () och cylindriska () koordinater.
Jaa okej v^2/R är ju accelerationen i normalriktningen an från mek1 och den andra är väl mha cylindriska koordinater som du sa.
