
Förhållande mellan hastighet och och moment vid inverterad pendel?
Hej!
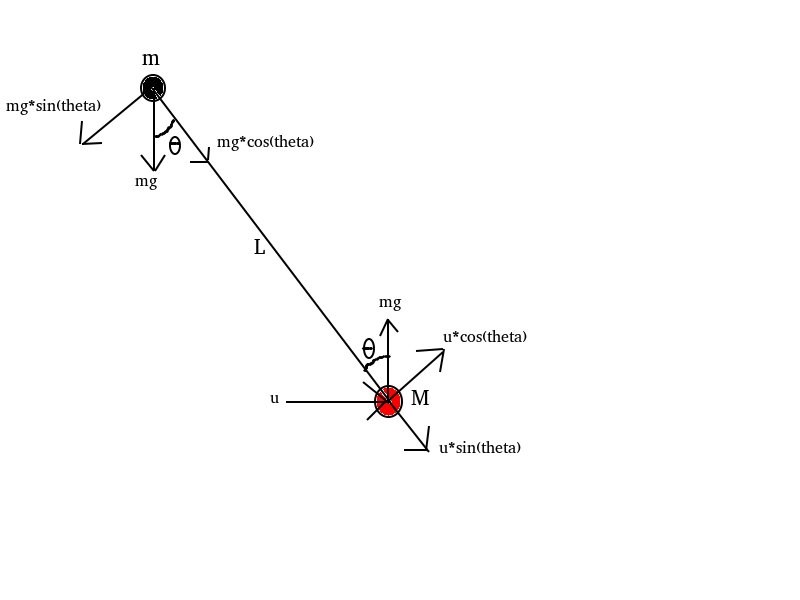
Här är en inverterad pendel.
Ekvationen för denna inverterad pendel är:
Där T är vridmomentet i leden där nere. Variabeln s är sträcka. Finns det en till ekvation där man kan beskriva ett förhållande mellan virdmomentet T och hastigheten ? Orsaken varför jag frågar det är för att om man skjuter pendeln bakåt(se bild) så kommer pendeln att vilja räta upp sig. Variabeln b är en friktionskonstant.


Enligt figuren är pendeln fritt ledad så det finns inget moment. Dina ekvationer stämmer inte riktigt. Hur har du fått fram dom?
Henrik Eriksson skrev :Enligt figuren är pendeln fritt ledad så det finns inget moment. Dina ekvationer stämmer inte riktigt. Hur har du fått fram dom?
Jag kollade lite här.http://people.kth.se/~crro/segway_challenge/model.html
Sedan tänkte jag att om jag tillför en kraft F så måste jag få en motkraft Då borde jag uppfylla Newtons andra lag. Då fick jag för accelerationen påverkar både massan M och m.
Accelerationen för m är beroende av vinkelns första och andraderivator också. Det här är en ganska besvärlig uppgift så jag undrar varifrån den kommer. Det bästa sättet är nog att införa stångkraften P som en tredje okänd variabel. Då får du tre ekvationer: m horisontellt, m vertikalt, M horisontellt.
Henrik Eriksson skrev :Accelerationen för m är beroende av vinkelns första och andraderivator också. Det här är en ganska besvärlig uppgift så jag undrar varifrån den kommer. Det bästa sättet är nog att införa stångkraften P som en tredje okänd variabel. Då får du tre ekvationer: m horisontellt, m vertikalt, M horisontellt.
Oj. Då! Nej. Det är så att jag försöker skapa en LQG med arduino och jag tränar lite att simulera med GNU Octave :)
Men om man gör det lite enkelt för sig och antar krafter i X-led och Y-led samt rotation? Sedan får jag linjärisera med Jacobian.
Min tanke med att modellera ett dynamiskt system på en inverterad pendel är följande steg:
Steg 1: Jag skjuter till blocket med en kraft F.
Steg 2: Pendeln som sitter fast på blocket börjar då vika sig mot min kraftvektor F.
Steg 3: När pendeln viker sig åt min min kraftvektor F så får blocket en extra kraft
Steg 4: När pendeln börjar tippa så går det fortare och fortare. Sträckan i x-led och y-led som lilla massan rör sig på kan uttryckas som där s är sträckan för blocket.
Så jag vet sträckorna nu och vad massorna väger. Men nu vet jag inte mer.
.jpg?width=80&crop=0,0,80,80)
Jag förstår inte vad du vill göra? Det är två frihetsgrader och således två oberoende ekvationer. En ytterligare ekvation kommer ej ge mer information om systemet.
emmynoether skrev :Jag förstår inte vad du vill göra? Det är två frihetsgrader och således två oberoende ekvationer. En ytterligare ekvation kommer ej ge mer information om systemet.
Jag försöker modellera upp en pendel i en tillståndsmodell.
Henrik Eriksson skrev :Accelerationen för m är beroende av vinkelns första och andraderivator också. Det här är en ganska besvärlig uppgift så jag undrar varifrån den kommer. Det bästa sättet är nog att införa stångkraften P som en tredje okänd variabel. Då får du tre ekvationer: m horisontellt, m vertikalt, M horisontellt.
Hej! Jag tror jag har löst detta på mitt sätt!
Alla krafter som påverkar blocket i X-led:
Ganska enkelt!
Alla krafter som påverkar lilla massan i X-led:
Där
Alla krafter som påverkar lilla massan i Y-led:
Där
Rotationen hos pendeln:
Slutligen blir ekvationerna:
Eller hur? Då vet jag exakt alla krafter som påverkar den lilla massan. Om det är noll krafter som påverkar den så är det stabilt!
Nu! Vad tror ni om detta? Allt man behöver göra är att räkna på momentet i mitten av pendeln.
Krafter i X-led för stora massan: (Notera att s är sträckan nu för massan M)
Moment T i mitten av pendeln: Har jag tänkt rätt här nu? Jag antar att mg*cos(theta) hjälper kraften u, eller ibland motverkar kraften u. Så pendeln rätar upp sig beroende på kraften u och därmed så orsakar u ett moment i mitten av pendeln. Precis samma som kraften mg som orsakar ett moment i mitten av pendeln.
Sedan har vi tröghetsmomentet theta i leden:
, där b är en friktionskonstant i leden.
Så sammanfattningsvis blir ekvationerna:
Så kan man anse att detta är godkända beräkningar? Dem kanske är något förenklade. Men jag vill bara simulera en approximation. Eller måste jag ersätta min derivata T med rörelsemängsmoment?
