Fysikalisk komponent
 Vad är fysikaliska komponenter och vad är det bra för?
Vad är fysikaliska komponenter och vad är det bra för?

Hej,
Det har inget med fysik att göra.
Kom ihåg att en vektor existerar oberoende av val av koordinatsystem; i ett koordinatsystem kan vektorn anges med koordinaterna (de "fysikaliska komponenterna") och i ett annat system anges samma vektor med koordinaterna (de "fysikaliska komponenterna") (-234.589, 3459.5132498).
Albiki skrev:Hej,
Det har inget med fysik att göra.
Kom ihåg att en vektor existerar oberoende av val av koordinatsystem; i ett koordinatsystem kan vektorn anges med koordinaterna (de "fysikaliska komponenterna") och i ett annat system anges samma vektor med koordinaterna (de "fysikaliska komponenterna") (-234.589, 3459.5132498).
Hej,
hahaha nej inte kopplat med fysik men varför har vi en relation med fysikalisk komponent och inte uttrycker direkt så här ?

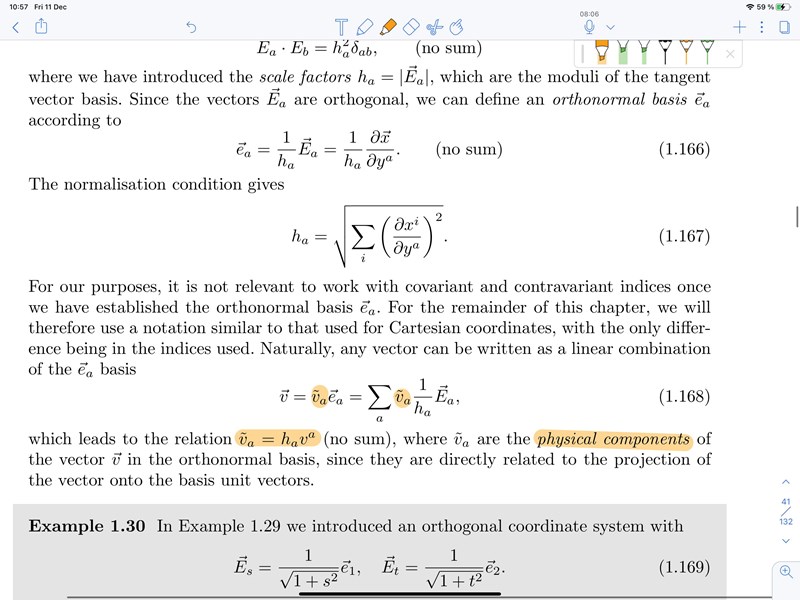
En vektors fysikaliska komponenter är de tal som står framför de normaliserade basvektorerna.
Om vi tar polära koordinater som exempel. Studera vektorn
I tangentbasen blir vektorns komponenter
I normalbasen blir vektorns komponenter
Och vektorns fysikaliska komponenter är
Om vektorn är en hastighet, vilken form är då enklast att använda för att beräkna hastighetens (fysikaliska) storlek?
Jroth skrev:En vektors fysikaliska komponenter är de tal som står framför de normaliserade basvektorerna.
Om vi tar polära koordinater som exempel. Studera vektorn
I tangentbasen blir vektorns komponenter
I normalbasen blir vektorns komponenter
Och vektorns fysikaliska komponenter är
Om vektorn är en hastighet, vilken form är då enklast att använda för att beräkna hastighetens (fysikaliska) storlek?
Om (r, ) = så får vi ut hastigheten enklast i fysikaliska komponenter va? För || = och vi kan kolla på komponenterna direkt. Hur räknade du ut basen för vektorn i de olika baserna? och är normalbasen samma sak som dualbasen?
Zeshen skrev:Om (r, ) = så får vi ut hastigheten enklast i fysikaliska komponenter va? För || = och vi kan kolla på komponenterna direkt. Hur räknade du ut basen för vektorn i de olika baserna? och är normalbasen samma sak som dualbasen?
Ja, det stämmer!
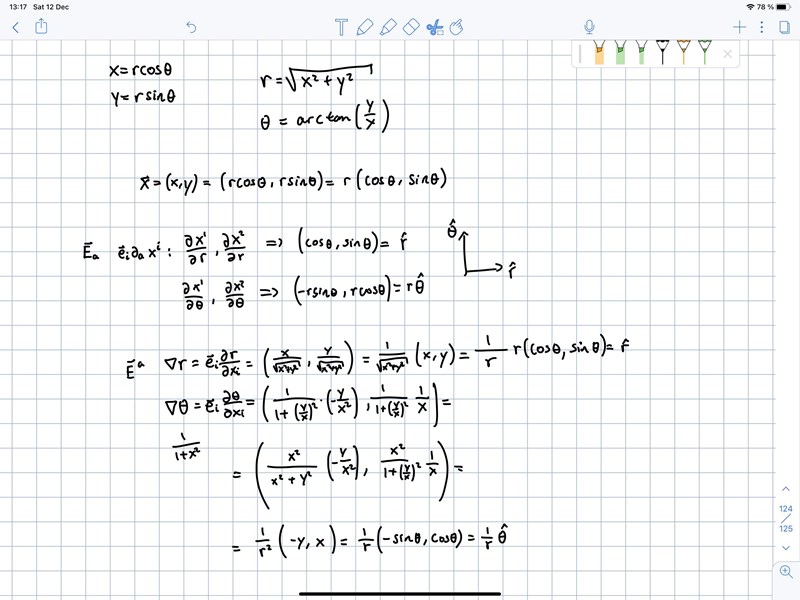
Enligt de beteckningar ditt läromedel använder blir tangentbasen:
Med skalfaktorerna och .
Om vi vill kan vi lösa ut normalbasen från parbildningen genom skalärprodukten:
Normalbasen kan också identifieras genom att bilda gradienten av koordinatfunktionerna:
När vi väl känner till basvektorerna är det en smal sak att uttrycka vektorn i de olika baserna.
Man kan (och brukar) betrakta normalbasen som en sorts dualbas, men tänk på att man ibland avser en mer abstrakt parbildning.
Jroth skrev:Zeshen skrev:Om (r, ) = så får vi ut hastigheten enklast i fysikaliska komponenter va? För || = och vi kan kolla på komponenterna direkt. Hur räknade du ut basen för vektorn i de olika baserna? och är normalbasen samma sak som dualbasen?
Ja, det stämmer!
Enligt de beteckningar ditt läromedel använder blir tangentbasen:
Med skalfaktorerna och .
Om vi vill kan vi lösa ut normalbasen från parbildningen genom skalärprodukten:
Normalbasen kan också identifieras genom att bilda gradienten av koordinatfunktionerna:
När vi väl känner till basvektorerna är det en smal sak att uttrycka vektorn i de olika baserna.
Man kan (och brukar) betrakta normalbasen som en sorts dualbas, men tänk på att man ibland avser en mer abstrakt parbildning.
Aaaah! Nu fick jag en mycket bättre bild av de olika baserna! Tack så mycket för en tydlig förklaring :D
Det var lite jobbigt att räkna ut normalbasen genom gradienten, i detta fall vet vi att och är (cos,sinθ) och (-sinθ, cosθ), ifall vi skulle använda en annan bas så kanske det vore svårt att reda ut saker
Snyggt!
Och ja, det kan vara jobbigt att räkna ut normalbasen genom gradienten. Först måste man ju veta (eller räkna ut) de inversa koordinatfunktionerna , sedan måste man dessutom krångla sig igenom gradientberäkningen.
Därför kan det vara enklare att dela tangentbasvektornerna med skalfaktorerna i kvadrat (), dvs följande samband gäller
Normalbasernas- tangentbasernas längder är alltså relaterade så att
Ibland kallar man normalbasen den kontravarianta basen och skriver den då med ett index upptill .
Jroth skrev:Snyggt!
Och ja, det kan vara jobbigt att räkna ut normalbasen genom gradienten. Först måste man ju veta (eller räkna ut) de inversa koordinatfunktionerna , sedan måste man dessutom krångla sig igenom gradientberäkningen.
Därför kan det vara enklare att dela tangentbasvektornerna med skalfaktorerna i kvadrat (), dvs följande samband gäller
Normalbasernas- tangentbasernas längder är alltså relaterade så att
Ibland kallar man normalbasen den kontravarianta basen och skriver den då med ett index upptill .
Mmm, det var jobbigt men mest att man behöver tänka ut hur basvektorernas riktning ser ut i x,y och konvertera de till r och theta dvs. r_vek = (cos(theta),sin(theta)) och theta_vek = (-sin(theta), cos(theta))
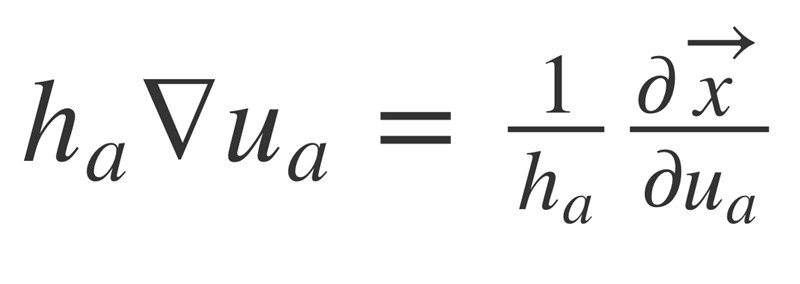 förstod inte helt varför det här gällde
förstod inte helt varför det här gällde
Yes så det är enklare att bara räkna ut tangentvektorn och dividera med 1/(h_a)^2, tack för hjälpen!
