0
svar
90
visningar

Kan man utveckla en LQR regulator trots att systemet är inte styrbart?
Vi säger att jag har en matris A och denna matris är inte styrbar enligt MATLAB's rank(ctrb(A, B)) = n formel. Men enligt simulering så ser det hur bra ut som helst och hela systemet är stabilt. Negativa egenvärden med andra ord.
Borde man inte då kunna utveckla en LQR regulator för att kunna tillämpa tillståndsåterkoppling?
Edit:
Här är en tillståndsmodell som fungerar riktigt bra att simulera. Stabil är den också. Men problemet är att denna modell har rank nummer 2 när det kommer till styrbarheten. Varför då? Jag kan styra exakt alla tillstånd i modellen. Testa själv och simulera.
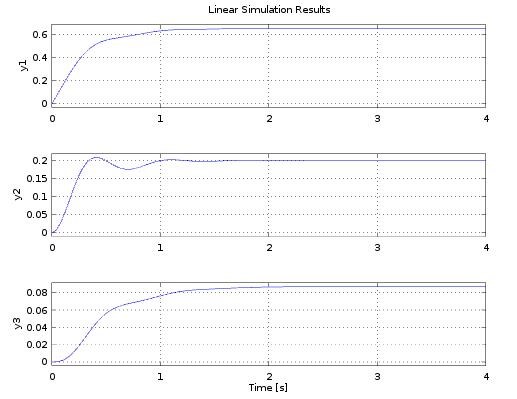
A = [0 1 0 0 0 0; -3555.6 -1000 3555.6 600 0 0;0 0 0 1 0 0; 35.556 6 -119.206 -8.946 8.365 0; 0 0 0 0 0 1; 0 0 125475 0 -287560.2 -90000]
B = [0; 80; 0; 0; 0; 0];
C = [1 0 0 0 0 0; 0 0 1 0 0 0; 0 0 0 0 1 0]
D = 0;
sys = ss(A, B, C, D);
u = linspace(20, 20, 100);
t = linspace(0, 4, 100);
x0 = [0; 0; 0; 0; 0; 0]
lsim(sys, u, t', x0')
