
Linjär algebra, bestäm matrisrepresentation av transformation
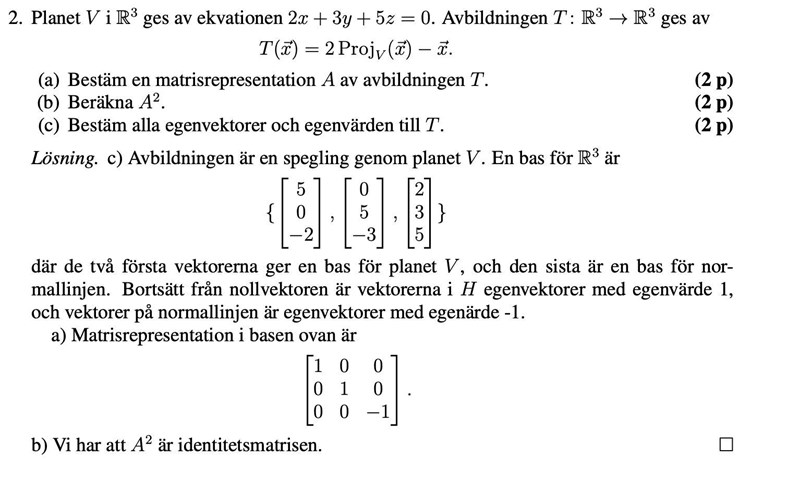
Förstår inte riktigt a uppgiften här. Hur kommer de fram till matrisrepresentationen som de gör? Min första tanke var att man skulle bestämma matrisen genom att sätta dess kolumner till T(ex), T(ey), T(ez), där e är respektive kolumn i identitetsmatrisen men detta blir inte samma som svaret som ges i a ovan

a)
Ta fram projektionen på normalen. Projektionen på planet är sedan identitetsmatrisen minus projektionen på normalen.
Vad blir projektionen av (x,y,z) på (2,3,5)?
Dr. G skrev:a)
Ta fram projektionen på normalen. Projektionen på planet är sedan identitetsmatrisen minus projektionen på normalen.
Varför är projektionen av på planet identitetsmatrisen minus projektionen av på normalen?
Dr. G Skrev:
Vad blir projektionen av (x,y,z) på (2,3,5)?
Det blir väl noll eftersom (x,y,z) är ortogonal mot (2,3,5). Eller menar du projektionen av på normalen?
(2,3,5) är en normalvektor till planet.
(x,y,z) är en godtycklig vektor i R3.
En vektor i R3 kan skrivas som en linjärkombination av en vektor i planet och en vektor längs normalen. Eftersom dessa två vektorer är ortogonala så summerar projektionsoperatorerna på respektive underrum till identitetsoperatorn. Jämför komposantuppdelning i en ortogonalbas.
Dr. G skrev:(2,3,5) är en normalvektor till planet.
(x,y,z) är en godtycklig vektor i R3.
En vektor i R3 kan skrivas som en linjärkombination av en vektor i planet och en vektor längs normalen. Eftersom dessa två vektorer är ortogonala så summerar projektionsoperatorerna på respektive underrum till identitetsoperatorn. Jämför komposantuppdelning i en ortogonalbas.
Förstår inte riktigt meningen ”Eftersom dessa två vektorer är ortogonala så summerar projektionsoperatorerna på respektive underrum till identitetsoperatorn”. Varför då?
Jag förstår inte riktigt hur de menar att ![]() skulle vara en matrisrepresentation av T eftersom t.ex blir
skulle vara en matrisrepresentation av T eftersom t.ex blir  multiplicerat med vektorn (2, 3, 5) lika med (2, 3, -5) och inte lika med (-2,-3,-5) som det borde.
multiplicerat med vektorn (2, 3, 5) lika med (2, 3, -5) och inte lika med (-2,-3,-5) som det borde.
Jag förstår även inte vilken matris egenvärderna fås fram från?

Lösningens val av bas för , dvs

är fiffig. Inte helt trivialt att bestämma de vektorer som genererar planet (dvs de två första basvektorerna). Jag väljer dock att använda den vanliga ON-basen i , dvs

Det blir lite knöligare kalkyler. Låt mig börja med en figur:

Planet går genom origo O. Planets normalvektor . Lägg ett ON-system med origo i O.
Punkterna P och Q är varandras spegelpunkter i planet. Vi noterar ur figuren:
(notera att jag väljer en annan vektorrepresentation för vektorn y
än det som står i din bifogade problemtext, vilken använder vektorn w i min figur.). Notera vidare att
är ortogonala projektionen av x på normalen QP. Enligt projektionssatsen gäller
, där är enhetsnormalvektor.
Med matriskalkyl får vi
, där är enhetsmatrisen.
Matristransponatet skall också noteras.
Med andra ord: Matrisen är den linjära avbildningens matrisrepresentation.
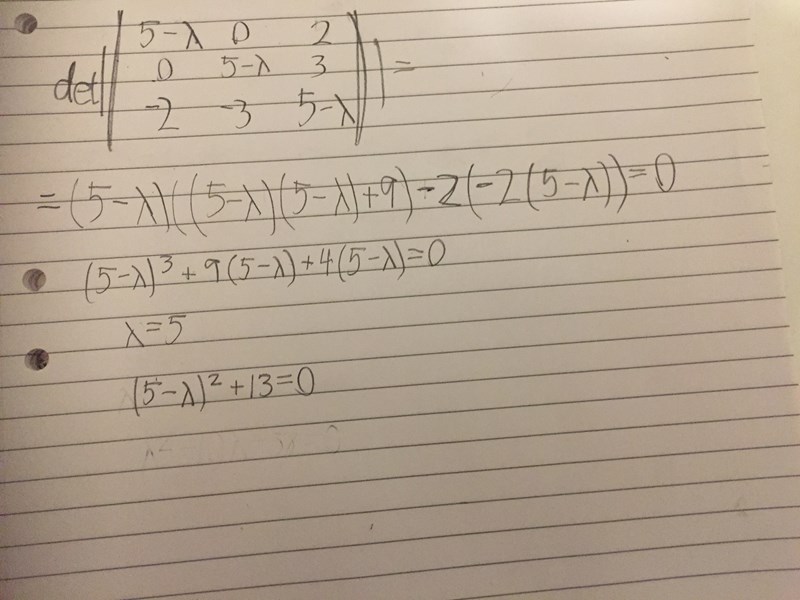
Efter lite räknande får vi

vilket slutligen blir

En enkel kalkyl visar, som förväntat, att . Utför gärna den kalkylen.
dr_lund skrev:Lösningens val av bas för , dvs
är fiffig. Inte helt trivialt att bestämma de vektorer som genererar planet (dvs de två första basvektorerna). Jag väljer dock att använda den vanliga ON-basen i , dvs
Det blir lite knöligare kalkyler. Låt mig börja med en figur:
Planet går genom origo O. Planets normalvektor . Lägg ett ON-system med origo i O.
Punkterna P och Q är varandras spegelpunkter i planet. Vi noterar ur figuren:
(notera att jag väljer en annan vektorrepresentation för vektorn y
än det som står i din bifogade problemtext, vilken använder vektorn w i min figur.). Notera vidare att
är ortogonala projektionen av x på normalen QP. Enligt projektionssatsen gäller
, där är enhetsnormalvektor.
Med matriskalkyl får vi
, där är enhetsmatrisen.
Matristransponatet skall också noteras.
Med andra ord: Matrisen är den linjära avbildningens matrisrepresentation.
Efter lite räknande får vi
vilket slutligen blir
En enkel kalkyl visar, som förväntat, att . Utför gärna den kalkylen.
Tack för hjälpen!
