
Linjär algebra, bestämma matris, avgör om den diagnoliserbar

Uppgift med svar. Förstår inte hur sambandet mellan rotationsmatrisen och de olika n värdena hänger ihop? Varför blir n=4k identitetsmatrisen samt adderar vi en etta får vi våran rotationsmatris?

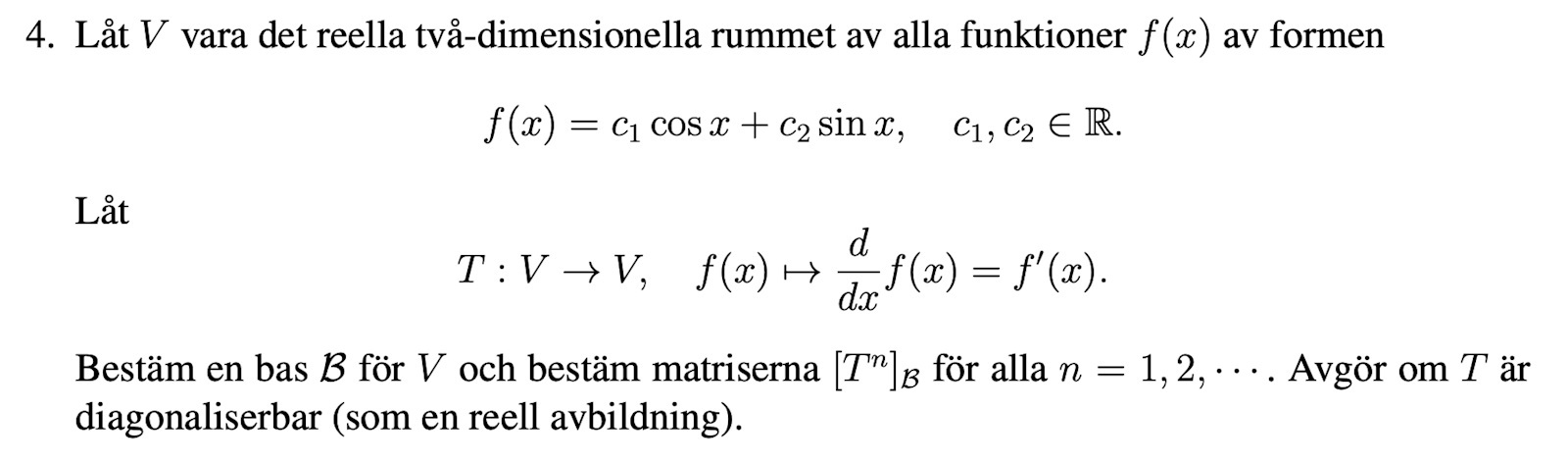
Om man deriverar cos(x) får man -sin(x).
Om man deriverar sin(x) får man cos(x).
Om man betraktar cos(x) och sin(x) som baserna i en matris så har vi en vektor [c1, c2] vars nya koordinater efter derivering som vi är nyfikna på.
Eftersom koordinaten framför cos(x) kommer avbildas till -sin(x) efter derivering så blir första kolumnen i motsvarande matris [0, -1]T.
Eftersom koordinaten framför sin(x) kommer avbildas till cos(x) efter derivering så blir första kolumnen i motsvarande matris [1, 0]T.
Därmed har vi matrisen för derivering uttryckt i termer av basen [cos(x), sin(x)].
Om man deriverar cos(x) fyra gånger så kommer vi att gå cos(x) -> -sin(x) -> -cos(x) -> sin(x) -> cos(x), så den avbildas på sig självt.
Om man deriverar sin(x) fyra gånger så kommer vi att gå sin(x) -> cos(x) -> -sin(x) -> -cos(x) -> sin(x), så den avbildas på sig självt.
Du kan också ta [T]F matrisen gånger sig självt fyra gånger för att se att identitetsmatrisen uppkommer.
Avbildningar med T en multipel av 4 gånger kommer vara att applicera identitetsmatrisen ett helt antal gånger, så därför får vi första raden i den sista tabellen. Övriga får man genom att applicera [T]F en gång, två gånger respektive tre gånger på identitetsmatrisen, och eftersom att var fjärde rotation tar oss tillbaka till början kommer det även var identiskt för var fjärde rotationssteg i övrigt.
