
Lösning mha Lagranges ekvationer
Följande uppgift ska lösas mha en lagrangian, jag har försökt:
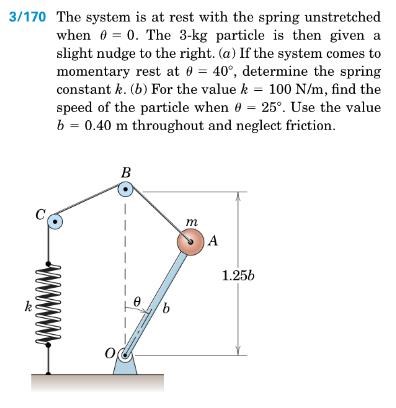
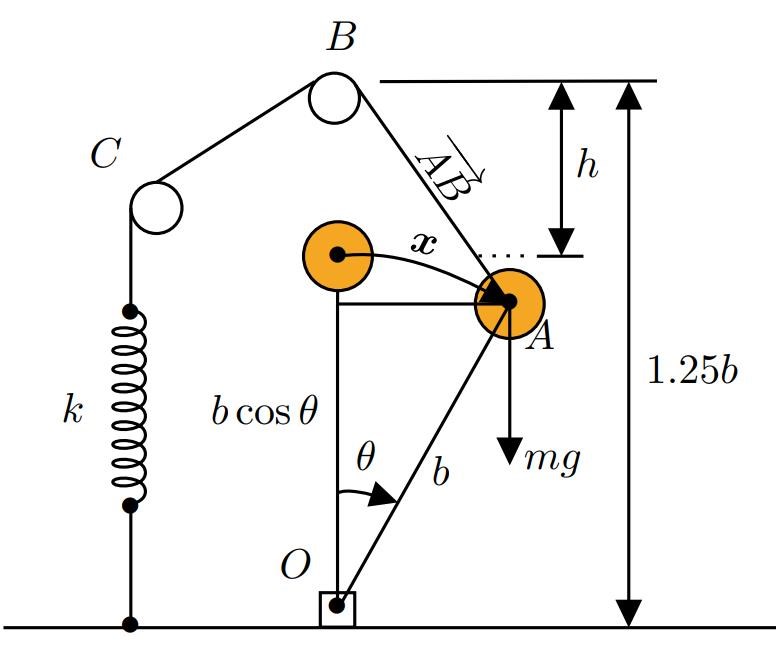
Friläggningen:
Lagrangian:
, där
Rörelseekvationen:
då är , således
då fås fjäderkonstanten N/m.
Nu i uppgift b) ska jag hitta hastigheten i , men jag lyckas inte!
Jag har försökt:
Då
Svaret ska nämligen bli 0.522 m/s men jag får inte till det, skulle verkligen uppskatta hjälpen!

migai skrev:
Jag återkommer till den här uppgiften men jag måste bara kommentera på detta. Hur kan bli negativt? Vad beskriver i så fall om inte fjäderns utdragning?
Det du ska dra bort från är väl längden på snöret vid , alltså ?
I a) får du sannolikt rätt på fjäderkonstanten därför att funktionen av är positiv för alla . Det jag däremot funderar på är om din definition orsakar problem i b).

Du säger att = 0 då = 40˚. Men från texten kan du bara sluta dig till att = 0 då = 40˚ (momentary rest).
Den potentiella energin borde kunna skrivas
V = mg + k
Edit: Jag gjorde en tankevurpa vid uppställningen av Lagrangianen, onödig info nedan.
Visa spoiler
Jag får Lagrangianen:
Euler-Lagrange ger:
Vi har (Edit: Smög sig in ett räknefel):
Vi får rörelseekvationen som:
Detta är som bekant inte en lämplig uppgift för analytisk lösning då differentialekvationen för systemet är andra ordningens icke-linjär i . Detta kräver numeriska metoder.
Jag vet ärligt talat inte om jag gjort fel någonstans eller om det är en dåligt utformad uppgift. I Meriam & Kraige löser man denna med energimetoder vilka möjliggör en annan utformning av resultatet som lånar sig mer åt att utnyttja faktumet att i punkten.
Ebola skrev:migai skrev:Jag återkommer till den här uppgiften men jag måste bara kommentera på detta. Hur kan bli negativt? Vad beskriver i så fall om inte fjäderns utdragning?
Det du ska dra bort från är väl längden på snöret vid , alltså ?
I a) får du sannolikt rätt på fjäderkonstanten därför att funktionen av är positiv för alla . Det jag däremot funderar på är om din definition orsakar problem i b).
Notera att det jag har märkt i friläggningen som x stämmer ej, dvs längden på det böjda linjesegmentet. Får också notera att x inte ska vara fetstil.
Självklart är fjäderförskjutningen
.
Med det rensade, låt oss nu härleda ekvationerna för Lagrangian:
Vi har att
där jag inte har förenklat det sista uttrycket och hoppas att jag inte har gjort ett misstag någonstans. För att hitta rörelseekvationen måste vi lösa differentialekvationen som härrör från
.
Härur är
Ett trick är att multiplicera , varje sida kan sedan uttryckas som tidsderivatan för något uttryck. Det hjälper att notera det för specifika Lagrangian att
ty du får en första ordningens differentiella ekvation i och .
Man kan göra det lite enkelt för sig här.
= mb2 = . Vi multiplicerar med , och får
= = - = -, så att
= 0, vilket ger oss en rörelsekonstant.

Ett annat sätt att se på PATENTERAMERAS lösning är att studera det man brukar kalla energifunktionen
Energifunktionen härleds som den ena termen ur uttrycket för då man ersätter (från Euler Lagrange:)
Energifunktionen är identisk med hamiltonianen (om än i förklädd form), jmfr
Om inte beror explicit på tiden, utan bara implicit, dvs den andra termen i härledningen, är konserverad. Vi kan sätta den till ett godtyckligt värde (potentialen är godtyckligt bestämd), t.ex. 0.
För vårt specifika fall gäller således:
Med insatta uttryck
Edit: man kan tillägga att den sista ekvationen är samma sak som , vilket betyder att vi (på ett komplicerat sätt) visat att systemets energi, summan av den kinetiska och den potentiella energin, ska vara konstant. En konstant vi kan välja godtyckligt genom potentialen.
