
Mekanik 1 - Dynamik | Rörelsemängdsmoment
Hej! Jag fattar inte hur detta svar inte stämmer. Enligt Chatgpt skulle det vara r12 istället för r1 men denna uppgiften finns i boken också och jag antar då att man ska kunna lösa den på detta sättet med formeln för angular momentum och impuls. Inte bara det men blir inte dimensionerna fel om man har r12 för då får vi väl meter * meter och då får vi till slut "m*s" och inte enbart "s" (sekunder) som enhet vilket är hastighet och inte tid?
Edit: AHHH... är i rad/s, inte m/s... Okej då stämmer enheten i.a.f.
Jag har också tre idéer till varför det jag gjorde inte funkade:
1. är fel. Det står att det är alla krafter som verkar på en partikel... dock i detta scenario vet jag inte var partikeln skulle vara. Kanske dela upp i två eller en vid O bara?
2. Jag multiplicerade r1 * mω fel eftersom det är vektorer och det är kryssprodukt emellan.
3. De kanske vill att jag ska använda tröghetsmoment (I=mr2, något som vi inte gått igenom) , m*v*d där m är massan, v=ωr där ω ofta är betecknad ... vilket jag inte vet var det kommer ifrån eller vad det ens är... och d är avståndet i.a.f... r=d förresten konstigt nog...



Jag förstår inte...
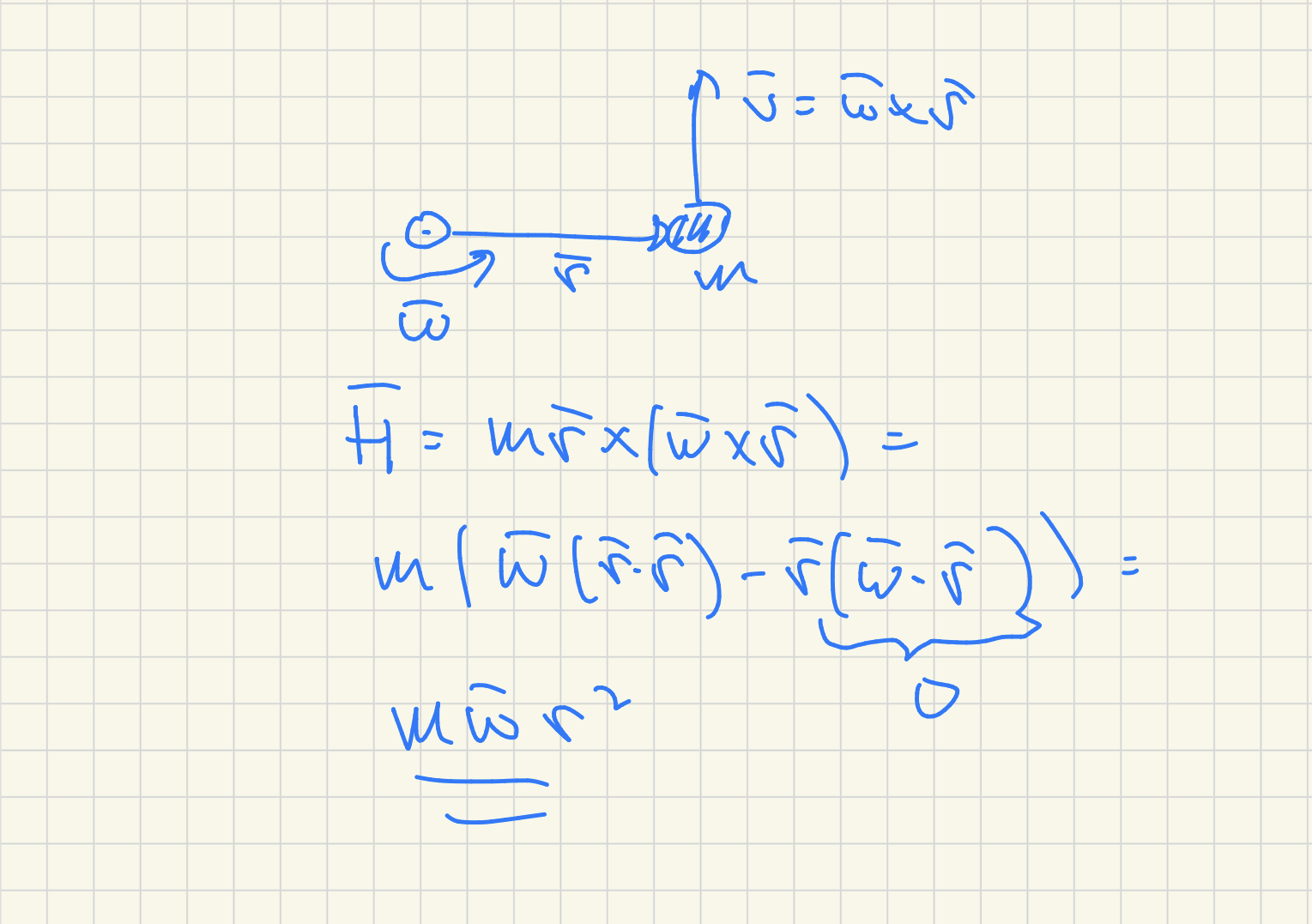
Rörelsemängdsmomentet för en kula blir .
Nämen det är två saker jag inte fattar i den figuren:
1. Hur kom du fram till att hastighetsvektorn blev det?
2. Hur utförde du kryssprodukt utan i j k tabellen?

För ett roterande koordinatsystem gäller att

Vektorn pekar rakt upp mot oss från pappret, utmed z-axeln. Man kan också skriva den som
kan också skrivas som Då blir .
Vissa kryssprodukter är bra att kunna utantill, för basvektorer i rätt ordning (enligt uppräkningsordningen gäller:
I omvänd ordning byter produkten tecken.
Slutligen är det bra att kunna taxiregeln (efter engelskans CAB)
Notera taximönstret "bac-cab"
Okej tack så mycket, jätte bra förklarat och illustrerat. Jag fattar nu i.a.f uppräkningsordingen och CAB regeln men det ovan...
Okej vänta den pekar utmed z-axeln så vi använder den ena högerhandsregeln (den för magnetism) för att få vridmomentets riktning som då är moturs okej då förstår jag det. Sen så får vi att ... vilket känns så udda... AHhh vänta vi har egentligen två hastigheter... den ena är vinkelhastigheten som är oberoende av var vi är på denna radien och sen så har vi hastigheten v som är beroende på var vi är på längden och då är den, specifikt just där vid r, hastighetsvektorn. Dessutom är en bas precis som så vi har övergått till polära koordinater...
Okej låter det rätt tolkat eller låter det mer som "njaaaa... inte riktigt rätt" lol
Jag tycker det låter rätt :)
Så en övningsuppgift
Utan Sarrus regel eller något!
D4NIEL skrev:Jag tycker det låter rätt :)
Så en övningsuppgift
Utan Sarrus regel eller något!
ahh det make:ar sense
du multiplicerade med enskilde term (precis som vid vanlig multiplikation), insåg att x gånger x blir två parallella baser och därmed 0 och sen så följer man den uppräkningsregeln x,y,z och om den på något sätt inte är i den ordningen när man utför kryssprodukt (oavsett var man räknar från) så sätter man minus tecken på vad som kommer sen.
Det är som att det sitter en väg/portal som sådan:
|x,y,z| och om vi puttar på x,y,z så funkar kryssprodukt som vanligt
|z,x,y| = z x = y
Detta borde gå att illustrera med koordinatsystem. Jag kommer ihåg när våran linjär algebra lärare försökte visa oss hur det gällde och OM det gick att byta position på de så gällde det (och då skulle man typ fippla något med fingrarna för att få till det)... asså idk det kändes as konstigt så som det förklarades med koordinatsystemet.
Ja, och det finns lite olika regler. På gymnasiet får man ofta lära sig någon form av "högerhandsregel", särskilt i fysiken.

När man vrider mot eller mer allmänt vrider den första vektorn mot den andra vektorn moturs pekar produkten rakt upp (som enligt bilden).
Vrider vi istället mot , dvs medurs får vi
Exakt det här, när man vrider... precis det
Edit: Jag har märkt att inom mekaniken och linjär algebra så innebär väldigt ofta en vridning moturs den positiva riktningen. Det känns konstigt eftersom klockor (i.a.f fysiska, gammaldags eller konventionella) vrider medurs... Något som man ser typ varje dag.
Edit 2: Men det är konstigt fortfarande. Detta går väl inte att göra med mina fingrar eller får mina fingrar nya beteckningar? Om mina fingrar är som på bilden, jag vrider min hand moturs, nu så pekar y mot andra hållet (alltså -x) och då får vi en ny bas/koordinatsystem?
Jag vet ju inte riktigt vad du gör eller hur du roterar, det finns många högerregler. Men det är alltså viktigt att du behåller "uppräkningsordningen" så att inte y hamnar framför x utan att de ligger i ordning.
Till exempel:

Den här kanske hjälper dig mer :)

Aa okej nej jag förstår nu och det är väldigt likt den där väggen eller om man har en foten till en tripod. Putta x mot y kommer göra att y tar nästa tillgängliga plats (z:s plats) och då tar z nästa plats (x:s föredetta plats). Jag tror det gäller vid högerhandsregeln, väggen och uppräkningsregeln... eller något i de tankebanorna. Okej nämen jag förstår nu rotationen...
Då är detta/dessa fortfarande en HON(Högerorienterad)-bas? Jag tror: Ja
ochhh... måste de alltid vara vinkelräta?
För att vara en ONH-bas ska basvektorerna uppfylla de tre bokstäverna:
- O, som i orto- eller ortogonalt (vinkelräta basvektorer)
- N, som i normerat (basvektorerna har längden 1)
- H, som i högersystem, dvs om basen anges i ordning xyz, ska determinanten för den orienteringen (följa högerregeln)
ONH står alltså för OrtoNormerat Högersystem.
Ahh det(x,y,z) = volymen av x,y,z i det högra ortonormerade systemet är större än 0 (ty högersystem). Alltså hade väl determinanten varit negativ om det var vänsterorienterat (en av baserna pekar i motsatt riktning)?
Sykey skrev:Ahh det(x,y,z) = volymen av x,y,z i det högra ortonormerade systemet är större än 0 (ty högersystem). Alltså hade väl determinanten varit negativ om det var vänsterorienterat (en av baserna pekar i motsatt riktning)?
Ja just det :) Så om du vill slippa definiera om kryssprodukter och integralsatser är det enklast att använda ett högerorienterat system då det går, gärna ortonormerat också.
D4NIEL skrev:Sykey skrev:Ahh det(x,y,z) = volymen av x,y,z i det högra ortonormerade systemet är större än 0 (ty högersystem). Alltså hade väl determinanten varit negativ om det var vänsterorienterat (en av baserna pekar i motsatt riktning)?
Ja just det :) Så om du vill slippa definiera om kryssprodukter och integralsatser är det enklast att använda ett högerorienterat system då det går, gärna ortonormerat också.
Ahh uppfattat. Tack så mycket!
