
Mekanik 1 - Dynamik (Tvångsvillkor och konstanta längd)

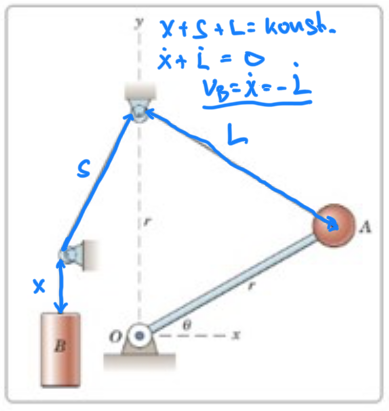
Okej så först ritade jag upp bilden, sen så försökte jag se vilka längder som var konstanta (c3 och r hade alltid samma längd). Sen ställde jag upp ekvationen för konstanta längden L = r + c2 + c3 + c4 och beräknade vad c2 var genom trigonometri och c4 = vBt. Sen deriverade jag det uttrycket för att få hastigheten... hmm vänta nu när jag tänker på det så kanske jag borde ta och addera de vertikala hastigheterna, alltså vB är vertikal, kanske ska jag ta vertikala för vA också, som borde bli negativ. Aja till slut fick jag att
vA, vilket var fel
Edit: Förslag annars är få fram ksk något med vB/A eller något ekvationssystem.


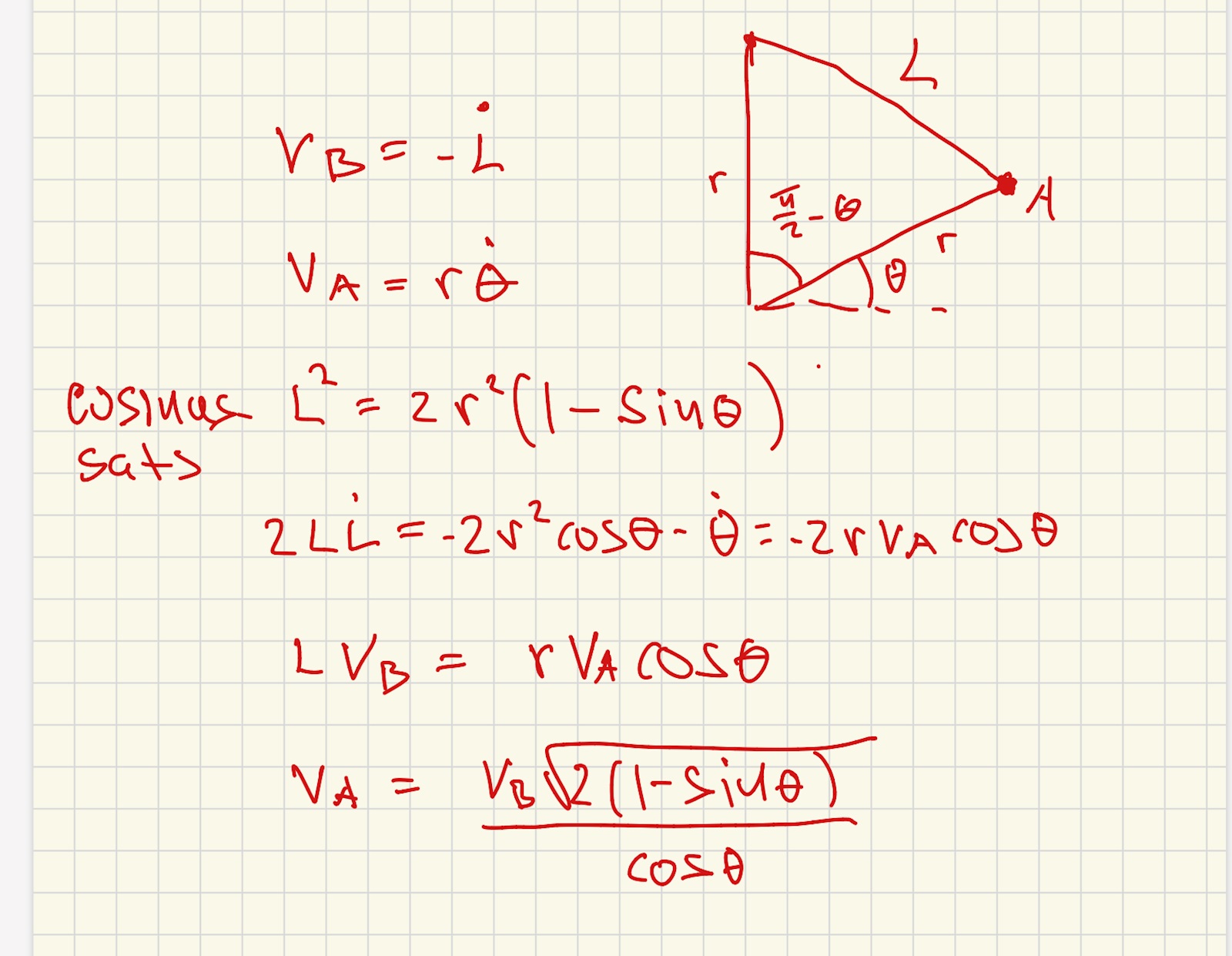
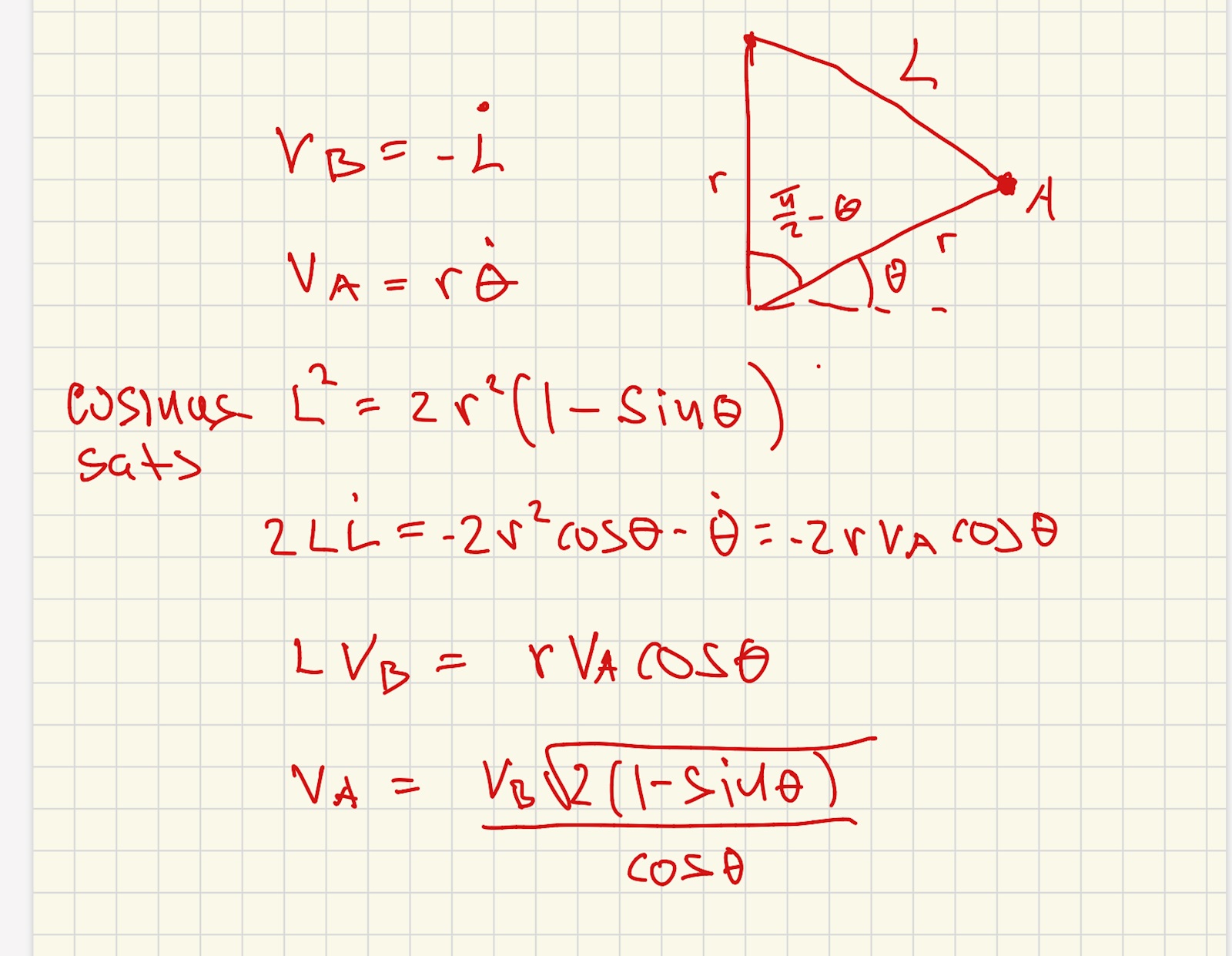
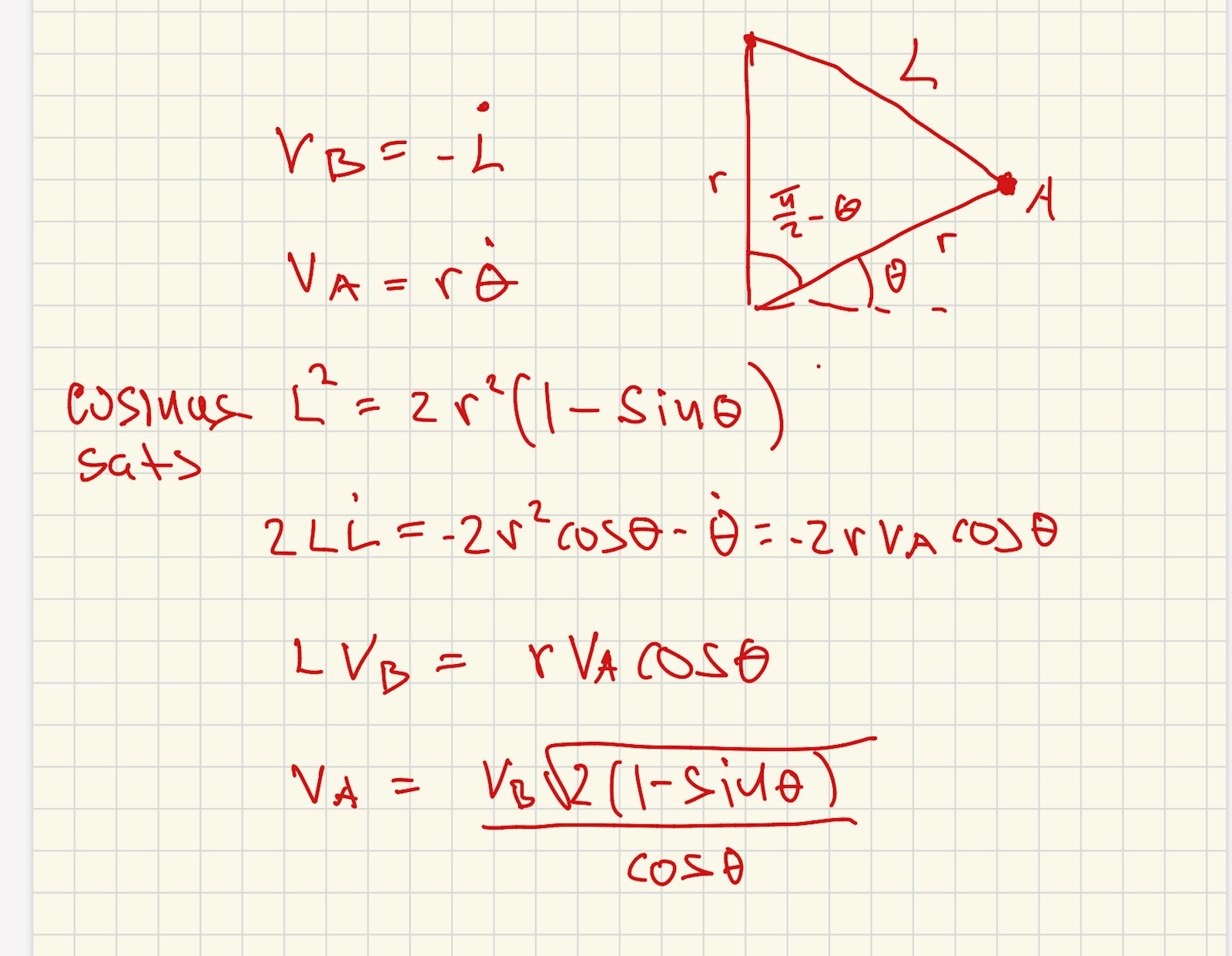
 När B har hastigheten VB har linan (och A) hastigheten VA = VB cos (alfa).
När B har hastigheten VB har linan (och A) hastigheten VA = VB cos (alfa).
alfa fås genom att triangeln är likbent till (pi/4 - fi/2)
(Med reservation för felräkning och tankefel, men ändå)
hansa skrev:
alfa fås genom att triangeln är likbent till (pi/4 - fi/2)
(Med reservation för felräkning och tankefel, men ändå)
Hur vet du det och hur kunde du skriva om det på sådant sätt. Tog basically bort hela vänstersidan?

Ett försök.
hansa skrev:
alfa fås genom att triangeln är likbent till (pi/4 - fi/2)
(Med reservation för felräkning och tankefel, men ändå)
Hmm, jag prövade vA=vB*cos() men det blidde fel :/
Tror att Hansa blandat ihop vA och vB. Testa med 1/cos(pi/4-theta/2) istället.
PATENTERAMERA skrev:Ett försök.
Det blidde rätt men venne om jag hänger med. Jag fick ju att vA = , (fast som då var C). Hur visste du först och främst vilket tecken det skulle ha i sådana fall.
Jaha vänta först så identifierar man vad det är för typ av rörelse, radien är konstant men den följer cirkelrörelse, ska man då använda sig av enhetsvektorer i polärt koordinatsystem. Dock ska inte vA vara vinkelrät eller i alla fall e, för att det ska funka
Jaha sen tas roten ur L2 och så får då L och sen substituerar ut så försvinner r sedan.
Bara en grej jag fattar inte mitt-termen i fjärde ekvationen (-2r2cos*)
PATENTERAMERA skrev:Tror att Hansa blandat ihop vA och vB. Testa med 1/cos(pi/4-theta/2) istället.
Ja det blev rätt!! Fattar fortfarande inte hur han kunde flytta hastigheten dit.

Sykey skrev:
Bara en grej jag fattar inte mitt-termen i fjärde ekvationen (-2r2cos*)
Man har deriverat raden ovanför.
DSykey skrev:
PATENTERAMERA skrev:
Ett försök.
Det blidde rätt men venne om jag hänger med. Jag fick ju att vA = , (fast som då var C). Hur visste du först och främst vilket tecken det skulle ha i sådana fall. Nja, om B rör sig ner ett litet stycke så minskar L med motsvarande längd. VB = -dL/dt.
Jaha vänta först så identifierar man vad det är för typ av rörelse, radien är konstant men den följer cirkelrörelse, ska man då använda sig av enhetsvektorer i polärt koordinatsystem. Dock ska inte vA vara vinkelrät eller i alla fall e, för att det ska funka
Jaha sen tas roten ur L2 och så får då L och sen substituerar ut så försvinner r sedan.
Bara en grej jag fattar inte mitt-termen i fjärde ekvationen (-2r2cos*) Derivera båda sidor map t av det som cosinussatsen gav.
 Jo jag hade förväxlat A och B (Nånting gammalt intuitivt trädde fram och placerade naturligt A till vänster om B, (ABC)). Då blir uttrycken samma enligt beräkningarna ovan, med övergång till halva vinkeln.
Jo jag hade förväxlat A och B (Nånting gammalt intuitivt trädde fram och placerade naturligt A till vänster om B, (ABC)). Då blir uttrycken samma enligt beräkningarna ovan, med övergång till halva vinkeln.
Man kan fråga sig om kravet att svara i VB och teta innefattar teta/2
Laguna skrev:Sykey skrev:Bara en grej jag fattar inte mitt-termen i fjärde ekvationen (-2r2cos*)
Man har deriverat raden ovanför.
Förstår fortfarande it
Cosinussatsen ger
L2 = 2r2 (1).
Derivera (1) map tiden.
HL. .
VL. .
PATENTERAMERA skrev:Cosinussatsen ger
L2 = 2r2 (1).
Derivera (1) map tiden.
HL. .
VL. .
Jaha du tänker så på sista, 2r2 är en konstant så du bryter ut den, du använder kedjeregeln så du får , och därför kan du göra det m.a.p vinkeln. Ah nu make:ar det sense.
Men fortfarande så fattar jag inte hur ni båda två kunde flytta hastigheten från var den var, till höger, det var det jag mestadels inte hängde med på. Liksom hur visste ni båda två?
Menar du hur man kommer från andra ledet till det tredje? Det tittade jag inte på, men du har från tidigare att vA = r theta-prick.
(jag vet inte hur man prickar thetor just nu.)
Laguna skrev:Menar du hur man kommer från andra ledet till det tredje? Det tittade jag inte på, men du har från tidigare att vA = r theta-prick.
(jag vet inte hur man prickar thetor just nu.)
Näh men kolla på Hansas bild och kolla på min original bild på uppgiften. Kolla var hastigheten vB är i uppgiften och kolla hur Hansa förflyttar den på något mirakel upp till punkten A. Liksom hur kan man koppla det.
Kolla också på Patenterameras beräkning, hur visste hen att vB = -L (tecken inklusive) och att vA = r? Resten är beräkningar. Jag fattar det bara inte.
 Klart?
Klart?
PATENTERAMERA skrev:
Klart?
Bästa förklaringen jag sett för det är så sant. Hur var det med vA då? Jag trodde det endast var lika med r då den var vinkelrät med radien, men det är ju va inte garanterat att vara. Hur tänkte Hansa istället annars?
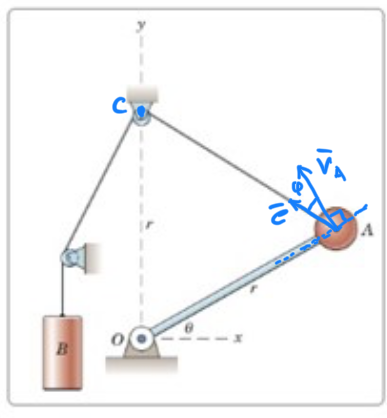 A:s hastighetsvektor är vinkelrät mot radien (vektorn ).
A:s hastighetsvektor är vinkelrät mot radien (vektorn ).
Om vi lägger in en enhetsvektor längs linan (se figur) så gäller det (försök att visa det) att vB = . Dvs vi kan se vB som projektionen av i linans riktning. Hansa räknar fram vad är utifrån en betraktelse av geometrin.
Tillägg: 28 jan 2026 18:54
Obs hansa kallar vinkeln för .
PATENTERAMERA skrev:
A:s hastighetsvektor är vinkelrät mot radien (vektorn ).
Om vi lägger in en enhetsvektor längs linan (se figur) så gäller det (försök att visa det) att vB = . Dvs vi kan se vB som projektionen av i linans riktning. Hansa räknar fram vad är utifrån en betraktelse av geometrin.
Tillägg: 28 jan 2026 18:54
Obs hansa kallar vinkeln för .
Kunde ej bevisa:
Kan inte vara genom skalärprodukt, vektorprodukt.
Kanske projektion eller geometri
Mitt försök/tankesätt:
Att vB är projektionen kan vi inte bara använda det du gjorde innan eftersom det anger L:s förändringshastighet (vilket då var vB).
Asså matten checks out men någonting känns ändå konstigt med intuitivt. vB är ju riktad rakt neråt no? Alltså är vB positiv, om vi använder din formel så är , och kom ihåg att vB var riktad neråt, ah vänta jag insåg nyss en sak. Det är INTE VEKTORER så det säger ingenting om riktning, (wait a min, hastighet är en vektor dock inte en skalär), bara hur snabbt längden förändras per sekund.
Edit: Jag prövade det och jag kunde inte få till det vad det gällde tecknet vB= (-vB)*e. Min förklaring till att detta hade funkat är att förändringshastigheten L.är en storlek och om den är negativ och vi VET att vikten DRAR ner repet så repet går bara ett håll så är den RIKTNINGEN/HÅLLET negativt och därmed så är enhetsvektorn också negativ. Man brukar väl ändå säga typ så om system som inte är högerriktade?
Ja då är min enda förklaring denna vB=-vB*e-, som jag inte kan förklara.
Titta på vektorn . Det gäller då att
. Derivera detta map t.
Men , så vi har att .
PATENTERAMERA skrev:Titta på vektorn . Det gäller då att
. Derivera detta map t.
Men , så vi har att .
jaha det är det som är tricket, du använder formeln för normaliserad enhetsvektor. Intressant, okej och då inkluderade det negativa tecknet genom pure matematisk beräkning. Hade inte tänkt på det själv.
