
Mekanik: accelererande referensramar
Hej, se:

- Det står ”Parallelförflyttning av hela systemet S’ påverkar inte enhetsvektorerna” i slutet av första sidan,, varför då? Är det för att de är fria vektorer?
- Tillåter vi ett accelererande ?
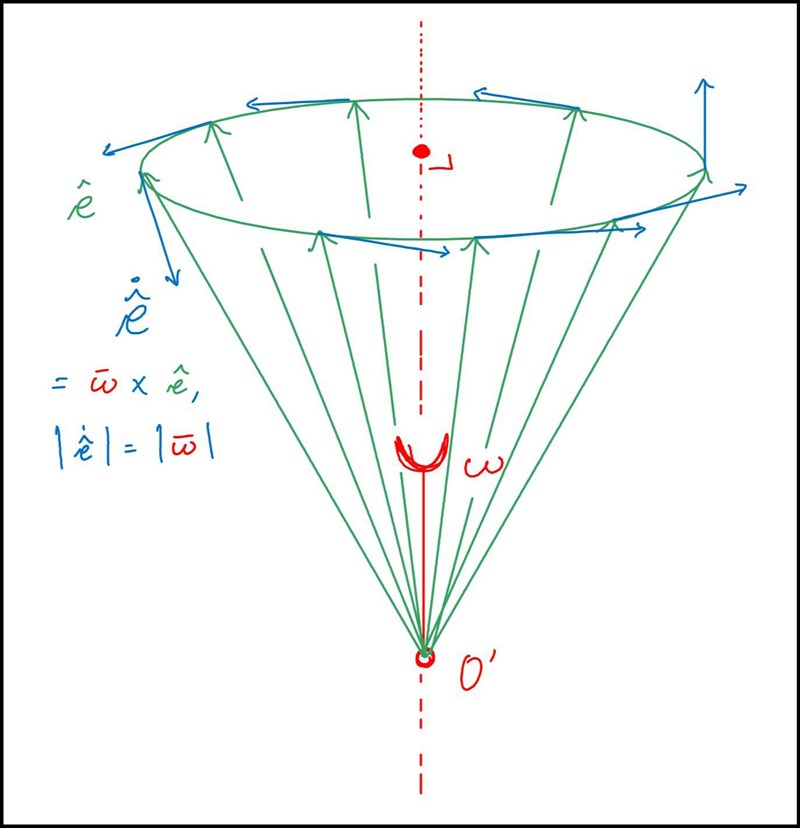
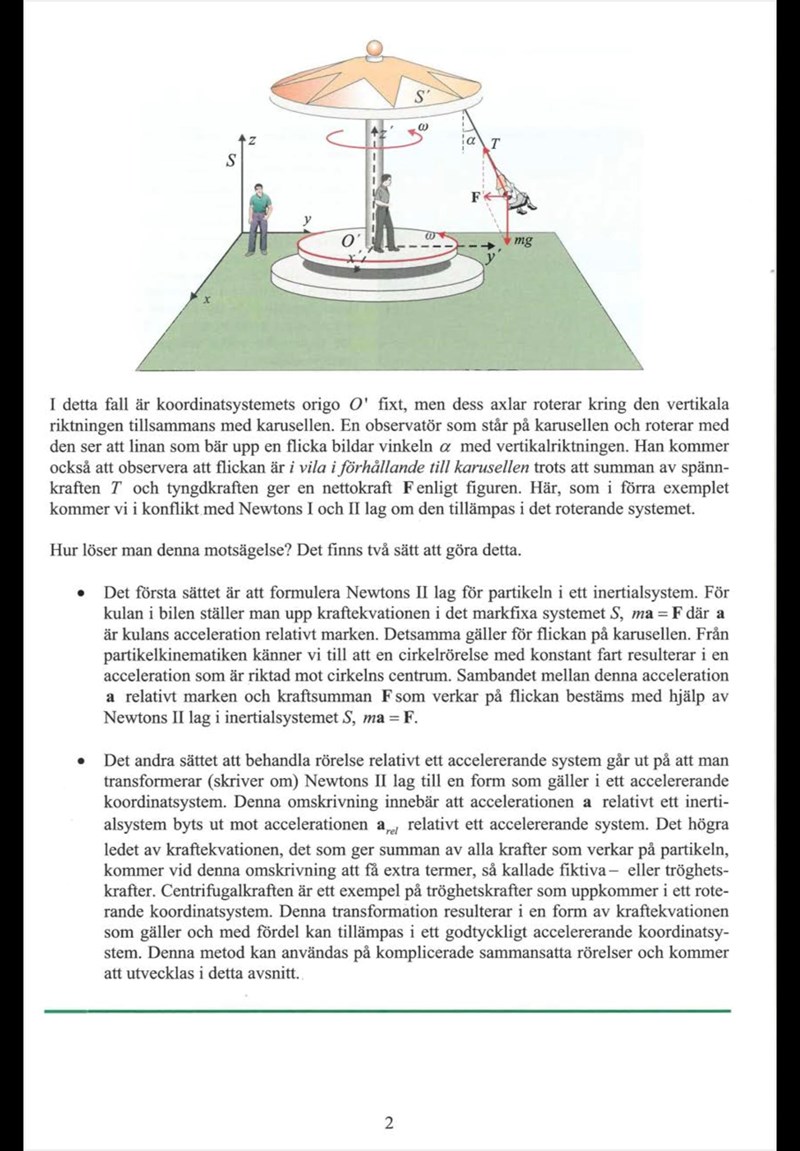
- Är den här bilden en korrekt beskrivning av situationen? Jag tänker mig en kon

- Enhetsvektorerna för det rörliga systemet är definierade utifrån O' och om vi parallellförflyttar systemet S' kommer de fortsätta vara definierade utifrån O' på samma sätt. Detta är analogt med att du inte transformerar något koordinatsystems enhetsvektorer när du parallellförflyttar "axlar och origo". Jag tror att svaren under denna fråga kan hjälpa att räta ut några frågetecken inom övergången mellan vektoralgebra och tillämpad vektoralgebra i fysik (Math.stackexchange)
- Jag antar att du menar acceleration av eller och i så fall får påpekas att detta inte behandlas i denna beskrivning du lagt upp. Det följer på samma sätt med samma typ av härledning men är lite mer grötigt. (Edit: Det är lite märkligt att de inte noterar bristen på acceleration hos systemet någonstans då de får det att låta som om all typ av rörelse kan fullständigt bestämmas av deras samband vilket även för en sovande student inte kan stämma. Eller så har jag missförstått något.)
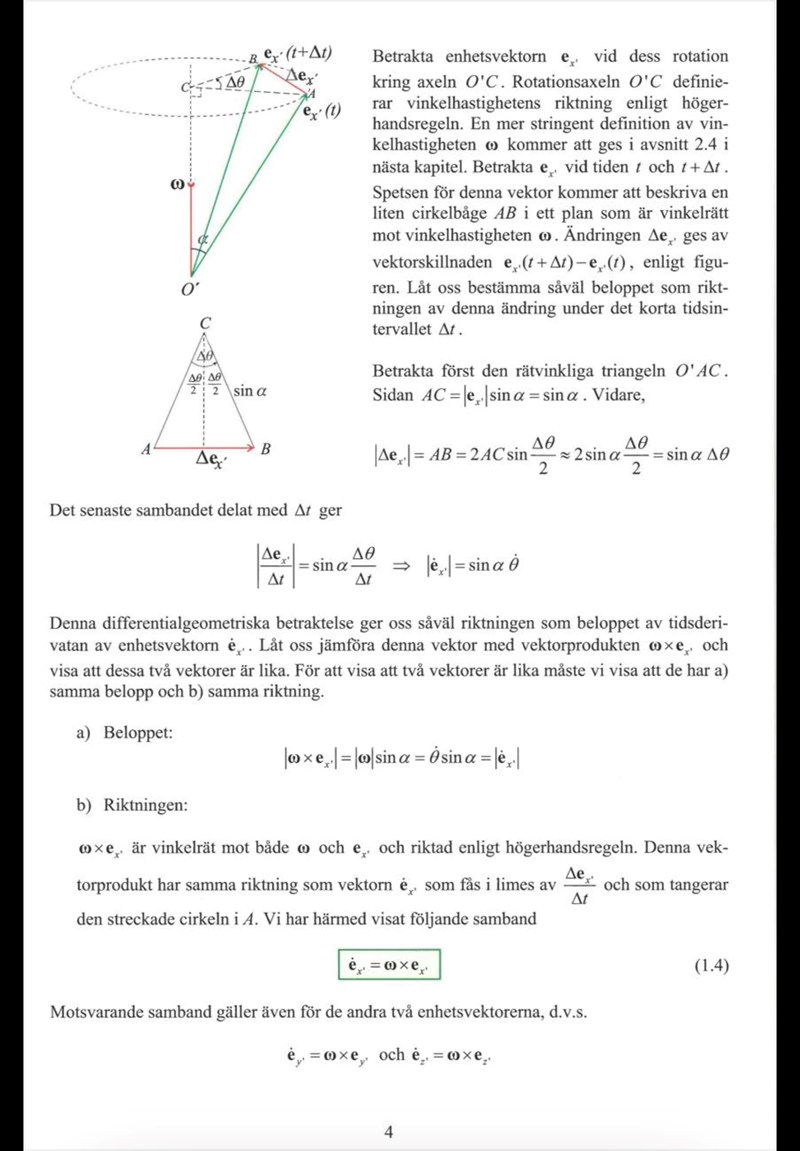
- Ja, den följer direkt av bilden på sidan fyra om . Du måste dock ha prim:ade axel-index för att vara helt korrekt.
- Okej, jag ska läsa den länken senare, det verkar krångligt.
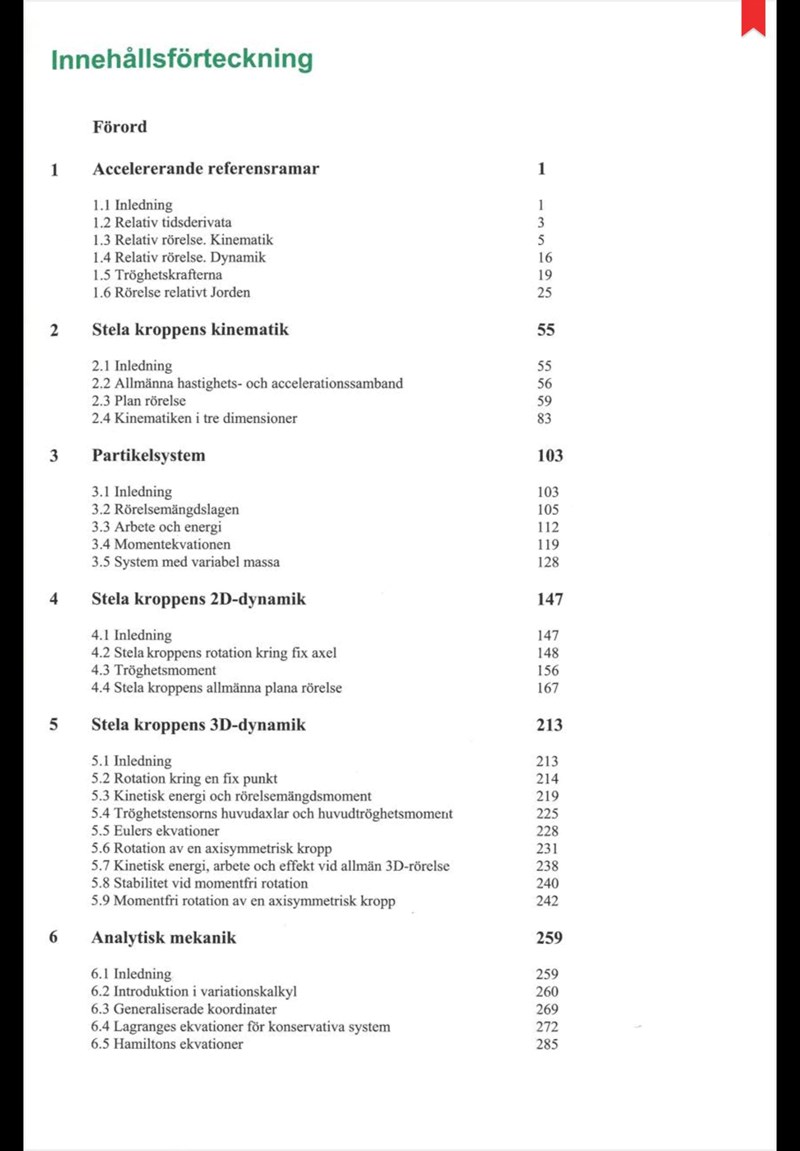
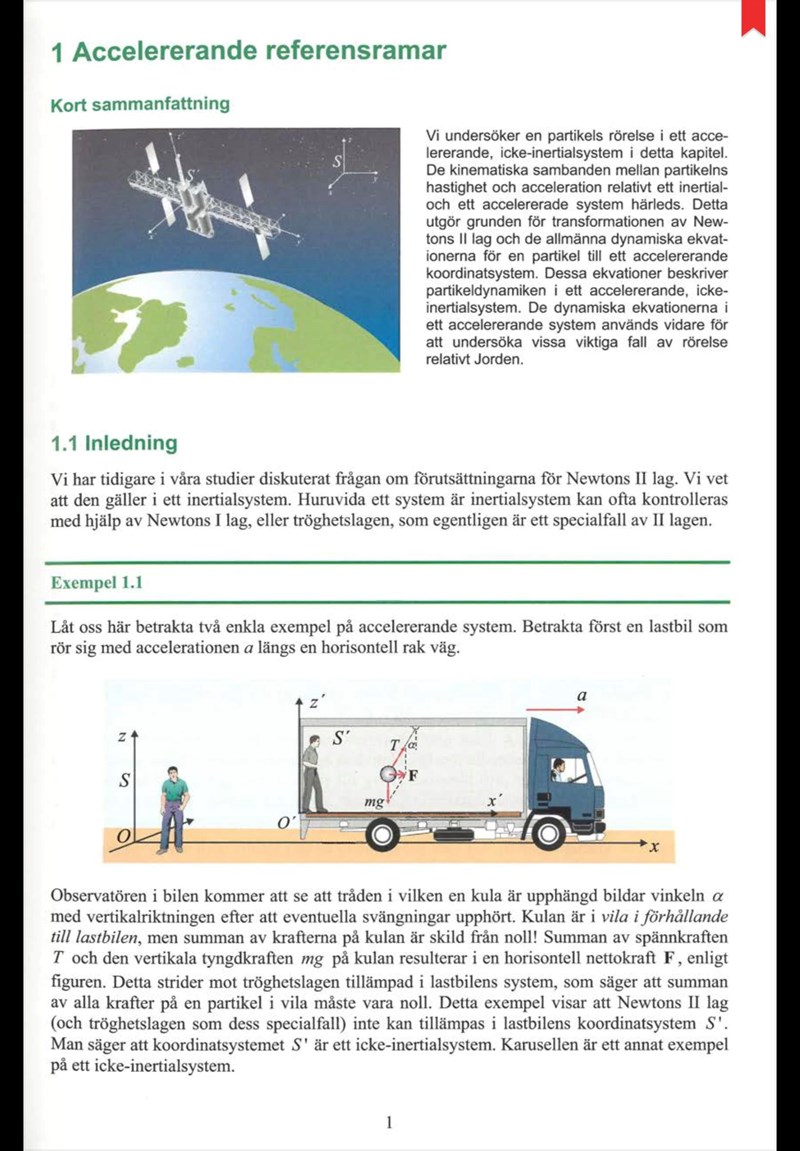
- Okej och hur söker jag upp en sån härledning online? Vad är det på engelska? Boken verkar lite konstig, innehållsförteckningen ser ut såhär: och här är kapitel 1.1: Vart härleds accelererande system?
- Aha just det, och den konstiga pilen för rotationsvektorn omega, är det konvention att skriva så?

Tänk på att detta är vektorer i den meningen som man läste om i gymnasiet, dvs storheter som har riktning och belopp och som kan modelleras som ”pilar”. I denna mening är två vektorer lika om de har samma riktning och samma belopp. Om S’ inte roterats så är vektorerna de samma eftersom de har samma riktning och samma belopp.
är vanligen tidsberoende. Du kan använda formlerna som härleds här för att behandla accelererade system också.
I en del böcker används denna typ av pil för att indikera att det är frågan om en axiell vektor.
Kolla kärna in den klassiska ”dynamics” av Kane och Levinson. Tyckte de hade en bra behandling av kinematiken.
Här va bilderna:
Visa spoiler
PATENTERAMERA skrev:Tänk på att detta är vektorer i den meningen som man läste om i gymnasiet, dvs storheter som har riktning och belopp och som kan modelleras som ”pilar”. I denna mening är två vektorer lika om de har samma riktning och samma belopp. Om S’ inte roterats så är vektorerna de samma eftersom de har samma riktning och samma belopp.
Ok! Bra förklarat. Asså rent allmänt har jag svårt för vektorbegreppet nuförtiden, det med generaliserade koordinatsystem och kröklinjiga koordinater, och det med tensorer, och det med ko/kontravarians, och det med differentialgeometri när man säger att till varje punkt associeras ett eget vektorrum med tangentvektorerna som bas blablabla.
Men kan du svara på min fråga, ja eller nej, kallas sånna vektorer fria vektorer? Alltså som endast bestäms av sin riktning och längd?
är vanligen tidsberoende. Du kan använda formlerna som härleds här för att behandla accelererade system också.
Okej... men i boken mekanik 1 (av samma författare) serveras alla härledningar på fat, behöver jag inte göra det om jag vill ha tidsberoende omega?
I en del böcker används denna typ av pil för att indikera att det är frågan om en axiell vektor.
Vad jag förstår är en fri vektor en vektor (pil) där det inte spelar någon roll var pilen placeras. Dvs vektorn är inte tänkt att beskriva en fysisk storhet som är kopplad till en viss punkt i rummet.
Om vi pratar hastighet, så är det ju i praktiken alltid frågan om hastigheten hos en given materiell punkt, så hastighet är väl inte en fri vektor, samma vad det gäller acceleration och krafter. Men vinkelhastigheten är väl i så fall mera av en fri vektor, den är visserligen kopplad till en referensram, men inte till någon viss punkt i rummet.
Men två vektorer kan ju formellt vara lika även om de associeras med olika punkter i rummet. Tex hastigheten kan ju vara den samma hos två olika punkter hos ett föremål.
Basvektorerna här skall ju vara parallella med axlarna och ha längd ett, men de kan väl i princip placeras var som helst. Så i den meningen är de väl fria.
Inom ren matematik är alla vektorer som spänner upp ett vektorrum fria. Du kan läsa mer på Engelska Wikipedia om det som kallas Euklidiska vektorer under Overview.
Om jag minns rätt är det vi normalt talar om inom fysiken de vektorer som spänner upp affina rum och således är bundna eller fixerade relativt punkter i ett koordinatsystem.
När man diskuterar sådana här saker inom fysik är det lätt att man tappar bort vad man faktiskt pratar om därför att fysiker icke-stringent använder det som passar. De våldför sig en aning på matematiken, om man frågar en matematiker.
En fri vektor är således inget märkvärdigt för någon som studerar vektorrum. Det är bara när vi försöker skaffa oss en fysikalisk intuition för dem som det börjar bli nästintill omöjligt att förstå dem därför att vi är så vana vid att fixera våra vektorer och ta för givet de steg som egentligen krävs för att åstadkomma detta.
Lika rörigt som mitt förra svar på detta ämne men, ja... TL;DR så är de inte fria vektorer fast de samtidigt är det.
Jag noterar att Kane och Levinson har en egen definition av ”bound vectors” och ”free vectors” på sid. 90 och 91.
En liten övning:
Visa att .
PATENTERAMERA skrev:En liten övning:
Visa att .
Inför först lite mer systematisk notation.
.
Sats:
Vid varje tidpunkt finns det en unik vektor sådan att , för i =1, 2, 3.
Vidarare gäller (Einsteins summakonvention utnyttjas i det följande) att .
Bevis:
.
Att bevisa entydigheten lämnas som övning.
Extra övning. Visa att
.
Ytterligare övning. Ovan har vi antagit att vektorerna (i = 1, 2, 3) är en högerorienterad ON bas. Hur ändras formlerna om vektorerna i stället är en godtycklig bas (men forfarande fixa relativt den rörliga referensramen naturligtvis)?
Entydigheten bevisas på "standardsättet".
Antag att vi funnit två vektorer och som uppfyller
, för i = 1, 2, 3.
Detta implicerar att = 0, för i = 1, 2, 3,
vilket är ekvivalent med att , för varje vektor , eftersom vektorerna utgör en bas.
Men det är bara möjligt om , dvs om . Därmed är entydigheten visad. Existensen visades tidigare.
