
Mekanik fk, ram/stängor, beräkna reaktionskraft, plan rörelse

Mitt försök:
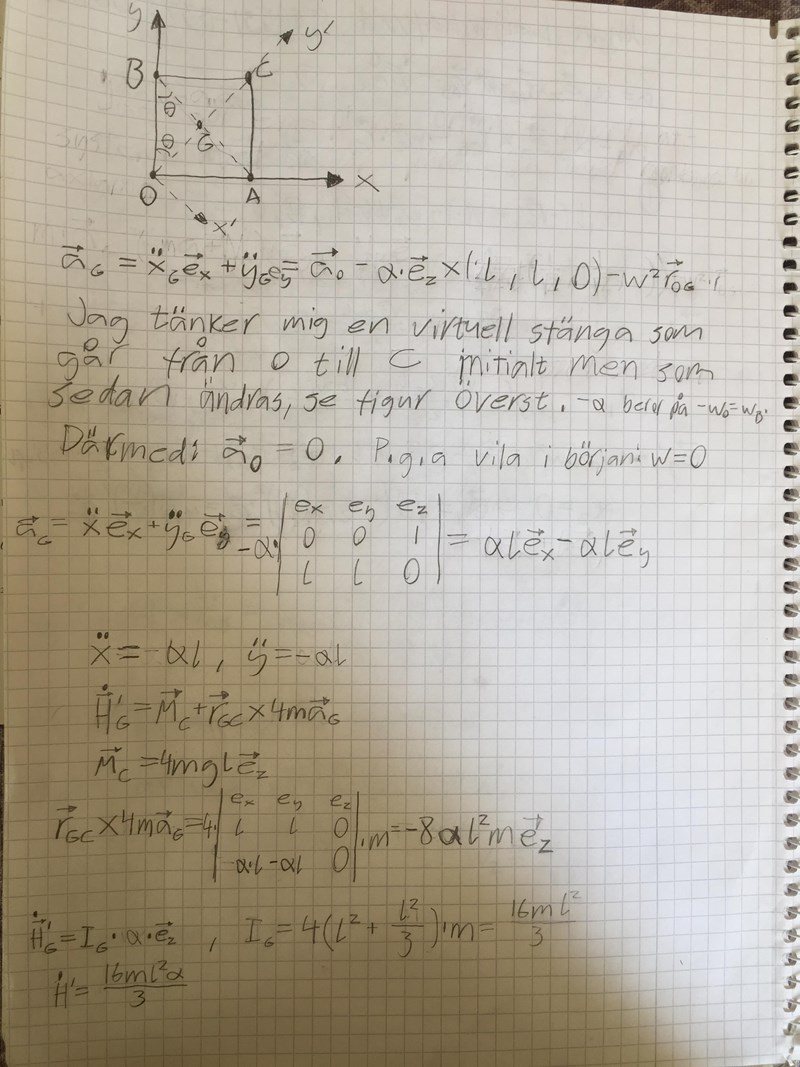
Jag har dubbelkollat efter slarvfel men jag hittar inget. Mitt svar blir fel men jag kan inte se om det är slarvfel eller om det är fel uppställning.

PATENTERAMERA skrev:
I det rörliga koordinatsystemet jag valde så valde jag punkt O till en fast punkt medan koordinatsystemet roterar så att vinkeln OBG alltid är samma som vinkeln BOG. y prim axeln kommer inte i alla ögonblick träffa ramen i C men kommer vara konstant i det primmade koordinatsystemet.
Johanspeed skrev:PATENTERAMERA skrev:I det rörliga koordinatsystemet jag valde så valde jag punkt O till en fast punkt medan koordinatsystemet roterar så att vinkeln OBG alltid är samma som vinkeln BOG. y prim axeln kommer inte i alla ögonblick träffa ramen i C men kommer vara konstant i det primmade koordinatsystemet.
Oklart vad du menar. Är O en punkt som är fix relativt ramen eller punkt som är fix relativt inertialsystemet?
PATENTERAMERA skrev:Johanspeed skrev:PATENTERAMERA skrev:I det rörliga koordinatsystemet jag valde så valde jag punkt O till en fast punkt medan koordinatsystemet roterar så att vinkeln OBG alltid är samma som vinkeln BOG. y prim axeln kommer inte i alla ögonblick träffa ramen i C men kommer vara konstant i det primmade koordinatsystemet.
Oklart vad du menar. Är O en punkt som är fix relativt ramen eller punkt som är fix relativt inertialsystemet?
Fixt relativt inertialsystemet. Jag använder mig av ett liknande koordinatsystem som de använder i en uppgift i boken:
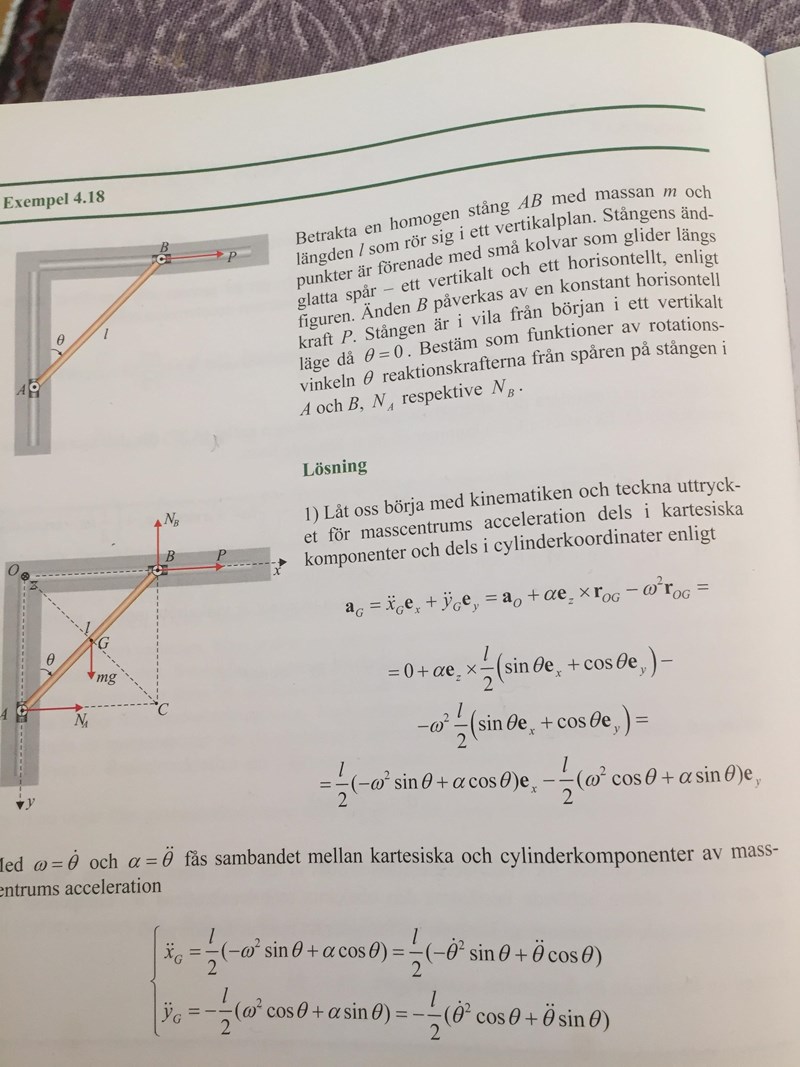
Lite annorlunda uppgift men jag använder ett liknande koordinatsystem där jag sätter = = 0
Johanspeed skrev:
PATENTERAMERA skrev:Johanspeed skrev:PATENTERAMERA skrev:I det rörliga koordinatsystemet jag valde så valde jag punkt O till en fast punkt medan koordinatsystemet roterar så att vinkeln OBG alltid är samma som vinkeln BOG. y prim axeln kommer inte i alla ögonblick träffa ramen i C men kommer vara konstant i det primmade koordinatsystemet.
Oklart vad du menar. Är O en punkt som är fix relativt ramen eller punkt som är fix relativt inertialsystemet?
Fixt relativt inertialsystemet. Jag använder mig av ett liknande koordinatsystem som de använder i en uppgift i boken:
Lite annorlunda uppgift men jag använder ett liknande koordinatsystem där jag sätter = = 0
Det ser ut som de räknar fel.
PATENTERAMERA skrev:
Det ser ut som de räknar fel.
Oj, jag tänkte inte ens på den detaljen. Jag tror inte det är någon fel beräkning, det verkar som att de efter kryssprodukten sätter för att de innan räknade ut vinkelaccelerationen för en axel genom OG, men egentligen är man intresserad av vinkelaccelerationen för en axel genom AG. Det borde förtydligat det genom att sätta eller liknande.
Johanspeed skrev:PATENTERAMERA skrev:
Det ser ut som de räknar fel.
Oj, jag tänkte inte ens på den detaljen. Jag tror inte det är någon fel beräkning, det verkar som att de efter kryssprodukten sätter för att de innan räknade ut vinkelaccelerationen för en axel genom OG, men egentligen är man intresserad av vinkelaccelerationen för en axel genom AG. Det borde förtydligat det genom att sätta eller liknande.
Hela härledningen verkar lite mysko. Hur kommer man från uttrycket med x och y till uttrycket där vinkelhastigheten kommer in. Ingalunda uppenbart.
Försök att lösa problemet med den vanliga tvåpunktsformeln istället och se om du får rätt svar.
PATENTERAMERA skrev:Johanspeed skrev:PATENTERAMERA skrev:
Det ser ut som de räknar fel.
Oj, jag tänkte inte ens på den detaljen. Jag tror inte det är någon fel beräkning, det verkar som att de efter kryssprodukten sätter för att de innan räknade ut vinkelaccelerationen för en axel genom OG, men egentligen är man intresserad av vinkelaccelerationen för en axel genom AG. Det borde förtydligat det genom att sätta eller liknande.
Hela härledningen verkar lite mysko. Hur kommer man från uttrycket med x och y till uttrycket där vinkelhastigheten kommer in. Ingalunda uppenbart.
Försök att lösa problemet med den vanliga tvåpunktsformeln istället och se om du får rätt svar.
Vad menar du med "vanliga tvåpunktsformen"? Är det inte den jag redan använt?

Stängerna är 2L långa men du har använt L.
Ebola skrev:Stängerna är 2L långa men du har använt L.
Var?
Tvåpunktsformeln är den som relaterar accelerationerna hos två punkter som är fixa i en stel kropp. Borde finnas någonstans i din bok.
PATENTERAMERA skrev:Tvåpunktsformeln är den som relaterar accelerationerna hos två punkter som är fixa i en stel kropp. Borde finnas någonstans i din bok.
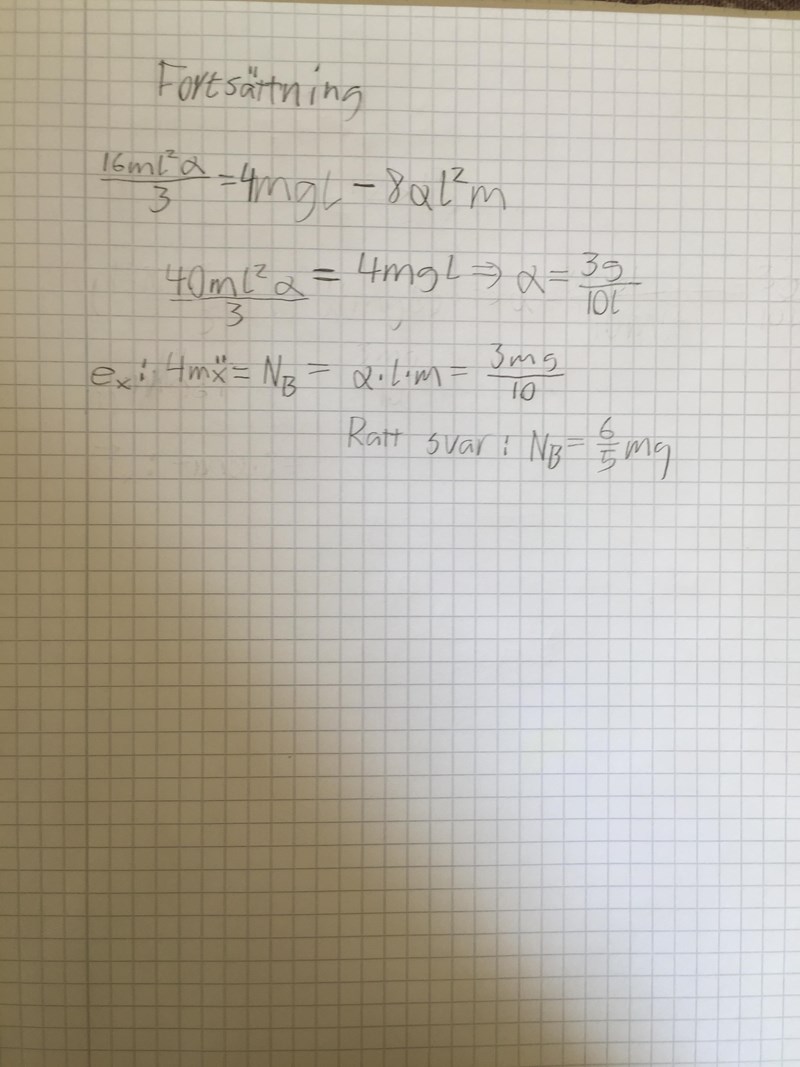
Det var det jag trodde. Det är ju den jag redan har använt. Jag räknade om hela uppgiften alldelles nyss och fick samma svar som innan
Johanspeed skrev:PATENTERAMERA skrev:Tvåpunktsformeln är den som relaterar accelerationerna hos två punkter som är fixa i en stel kropp. Borde finnas någonstans i din bok.
Men om jag väljer en sådan punkt hur ska jag då få fram den stela kroppens acceleration? Jag räknade om hela uppgiften alldelles nyss och fick samma svar som innan. Men det är definitivt inte fel i facit
