
Mekanik - Vinkelhastigheten som en vektor
När vinkelhastigheten ritas som en vektor så ritar föreläsaren inte den som en pil utan gör som en slags båge istället för pilspetsen, är det bara en beteckning som är speciell för vinkelhastigheten som en vektor eller har det någon annan djupare betydelse?
En ganska konstig fråga kanske.

Bilden är oklar.
Om man betraktar vinkelhastighet som en vektor är den vinkelrätt mot rotationsplanet: där är enhetsvektor vinkelrätt på vinkelförflyttningen.
Det är då en pseudovektor (axiell vektor).
Vet inte om detta gör det tydligare, men jag håller på att smått kolla på videoföreläsningar för en fortsättnignskurs i mekanik där det första momentet är accelererande referensramar. Föreläsaren börjar med att betrakta två koordinatsystem och , ett i vila och ett som rör sig med en hastighet samtidigt som det roterar med en vinkelhastighet kring en axel, varför man inför vinkelhastighet som en vektor har jag inte kommit till än, utan jag undrar bara varför vinkelhastighetsvektorn ritas som den gör, och inte som en pil? Kan det vara pågrund av att den är som du nämnde en pseudovektor? Fast då hade väl t.ex en normalvektor också ritats så, för det är väl också en pseudovektor?

Luffy skrev:
jag undrar bara varför vinkelhastighetsvektorn ritas som den gör, kan det vara pågrund av att den är som du nämnde en pseudovektor?
Ja, det skulle jag gissa men jag vet inte om jag har sett det tidigare.
Jag bildgooglade "pseudovektor" lite men jag hittade inga exempel.
Jag kollade runt i kurslitteraturen som är skriven av samma person som ritat figuren ovan och beteckningen verkar vara unik för vinkelhastigheten och det finns ingen förklaring till varför den ser ut som den gör så antar att det bara är ett sätt att representera vinkelhastigheten och inte så mycket djupare än så.

Luffy skrev:Fast då hade väl t.ex en normalvektor också ritats så, för det är väl också en pseudovektor?
Tänker du att normalvektorn till en parametriserad yta i 3 dimensioner är en axial vektor för att den ges av en kryssprodukt?
D4NIEL skrev:Luffy skrev:Fast då hade väl t.ex en normalvektor också ritats så, för det är väl också en pseudovektor?
Tänker du att normalvektorn till en parametriserad yta i 3 dimensioner är en axial vektor för att den ges av en kryssprodukt?
Ja, eller det var det jag läste på Wikipedia länken som Pieter Kuiper länkade.
Det jag menade var att om den beteckningen var just pågrund av att vinkelhastigheten var en pseudovektor så borde man väl ha stött på det tidigare när man använt sig av normalvektor som också är pseudovektor.
Luffy skrev:D4NIEL skrev:Luffy skrev:Fast då hade väl t.ex en normalvektor också ritats så, för det är väl också en pseudovektor?
Tänker du att normalvektorn till en parametriserad yta i 3 dimensioner är en axial vektor för att den ges av en kryssprodukt?
Ja, eller det var det jag läste på Wikipedia länken som Pieter Kuiper länkade.
Det jag menade var att om den beteckningen var just pågrund av att vinkelhastigheten var en pseudovektor så borde man väl ha stött på det tidigare när man använt sig av normalvektor som också är pseudovektor.
Det är kanske inte riktigt samma sak. En normalvektor av en sluten yta brukar vara definierad som "utåt". Den ändrar inte riktning när man ändrar handedness av koordinatsystemet.
(Men det här är inte något som jag vet så mycket om.)

Dubbelpil eller båge används av vissa för vinkelhastighet och rörelsemängdsmoment. Men, båge är väldigt ovanligt. Vilken serie har du hämtat detta ifrån?
SaintVenant skrev:Dubbelpil eller båge används av vissa för vinkelhastighet och rörelsemängdsmoment. Men, båge är väldigt ovanligt. Vilken serie har du hämtat detta ifrån?
Videoföreläsningar för fortsättningskurs i mekanik av Nicholas Apazidis , se första föreläsningen
Hm, om du pluggar på KTH kan du fråga Nicholas. Annars skulle jag föreslå att du mailar. Speciellt för att icke-standard notation kan vara bra att få koll på så att man förstår varandra.
Edit: Det verkar som om det är en hastig illustration av rotation runt en axel:
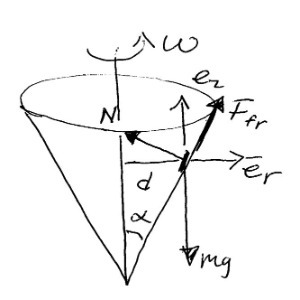
Detta är från en lösning av Apazidis.
Jag tror som SaintVenant att det bara betyder att det är ett moment eller något som snurrar runt en axel. Har sett liknande notation i hållfasthetslära och då betecknade det moment runt en axel.
Tycker inte du ska dra slutsatsen att det är kopplat till vektorns transformationsegenskaper.
Exempel där det skulle ställa till stora problem; ponera att du lägger ett (fixt) koordinatsystem i masscentrum på en kropp
Och om vi kopplar det till ett koordinatsystem som istället är fixerad i (roterar med) kroppen får vi
Nu skulle man kunna argumentera för att är en axial vektor eftersom Levi-Civita är en tensordensitet av enhetsvikt. Men om man vet hur definieras inser vi att man måste vara försiktig. Att använda ett eller flera bågstreck som indikation på pseudotensorns vikt verkar upplagt för missförstånd. Särskilt om det är tänkt att man ska addera och subtrahera bågstrecken på något invecklat vis.
D4NIEL skrev:Jag tror som SaintVenant att det bara betyder att det är ett moment eller något som snurrar runt en axel. Har sett liknande notation i hållfasthetslära och då betecknade det moment runt en axel.
Tycker inte du ska dra slutsatsen att det är kopplat till vektorns transformationsegenskaper.
Exempel där det skulle ställa till stora problem; ponera att du lägger ett (fixt) koordinatsystem i masscentrum på en kropp
Och om vi kopplar det till ett koordinatsystem som istället är fixerad i (roterar med) kroppen får vi
Nu skulle man kunna argumentera för att är en axial vektor eftersom Levi-Civita är en tensordensitet av enhetsvikt. Men om man vet hur definieras inser vi att man måste vara försiktig. Att använda ett eller flera bågstreck som indikation på pseudotensorns vikt verkar upplagt för missförstånd. Särskilt om det är tänkt att man ska addera och subtrahera bågstrecken på något invecklat vis.
Har inte läst Hållfasthetslära än så förstår inte så mycket, men det jag tar med mig är att det troligen betecknar rotation kring en axel. Kursen läser jag egentligen inte förrän efter sommaren så jag kan fråga Nicholas då. Men som sagt, jag tror det är som ni säger att det bara betecknar rotation kring en axel.
