
ON - Bas till Självadjungerad operator via Gram-Schmidt
Hej,
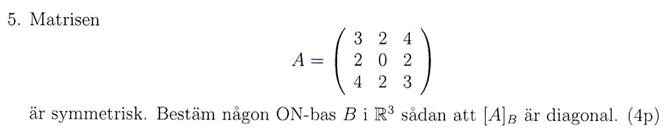
Matrisen är symmetrisk och reell och därmed är operator självadjungerad. Jag vet att det då går att skriva operatorn på en ON-bas så att operatorn är en diagonalmatris i den basen.
Matrisen i fråga har egenvärderna: -1 algebrasik multiplicitet 2 och 8. Jag vet att egenvektorerna blir:
Till -1: och , till 8:
Då v_1 och v_2 är till ett annat egenvärde än v_3 så är båda dessa ortogonala mot v_3 men ej ortogonala sins emellan. Jag vet att jag kan använda GS-algoritm:
Det jag inte är säker på riktigt är varför det "råkar" bli så att de "nya" vektorerna också blir egenvektorer till A. Tänker såklart framförallt på e_2.
Har det att göra med att u_2 är skapad av en linjärkombination av två egenvektorer till samma egenvärde och att jag därför är kvar i rummet och att alla andra vektorer i det rummet också blir egenvektorer till A med samma egenvärde? Känns som det borde bli så men vill dubbelkolla. Och i så fall kan jag alltid använda GS i sånt här fall utan att riskera att sabba diagonaliseringen va?
Tack på förhand!

Ja, egenvektorerna spänner upp ett delrum som man kan kalla egenrum, där alla vektorer är egenvektorer med samma egenvärde. Precis som du säger, den nya vektorn är en linjärkombinaiton av de två egenvektorerna vilket betyder att den tillhör egenrummet, dvs den är också en egenvektor med egenvärde -1.
Man kan verifiera att en linjärkombination av två egenvektorer tillhörande samma egenvärde i sig är en egenvektor genom att säga att de två egenvektorerna är och , och sedan skapar du för två tal t och s. Om vi då beräknar , dvs:
, alltså är enligt definitionen också egenvektor
Snyggt, tack för hjälpen! :)
