
Ortogonal projektion i R3
Hej!
Jag lyckas inte lösa uppgiften här nedan:
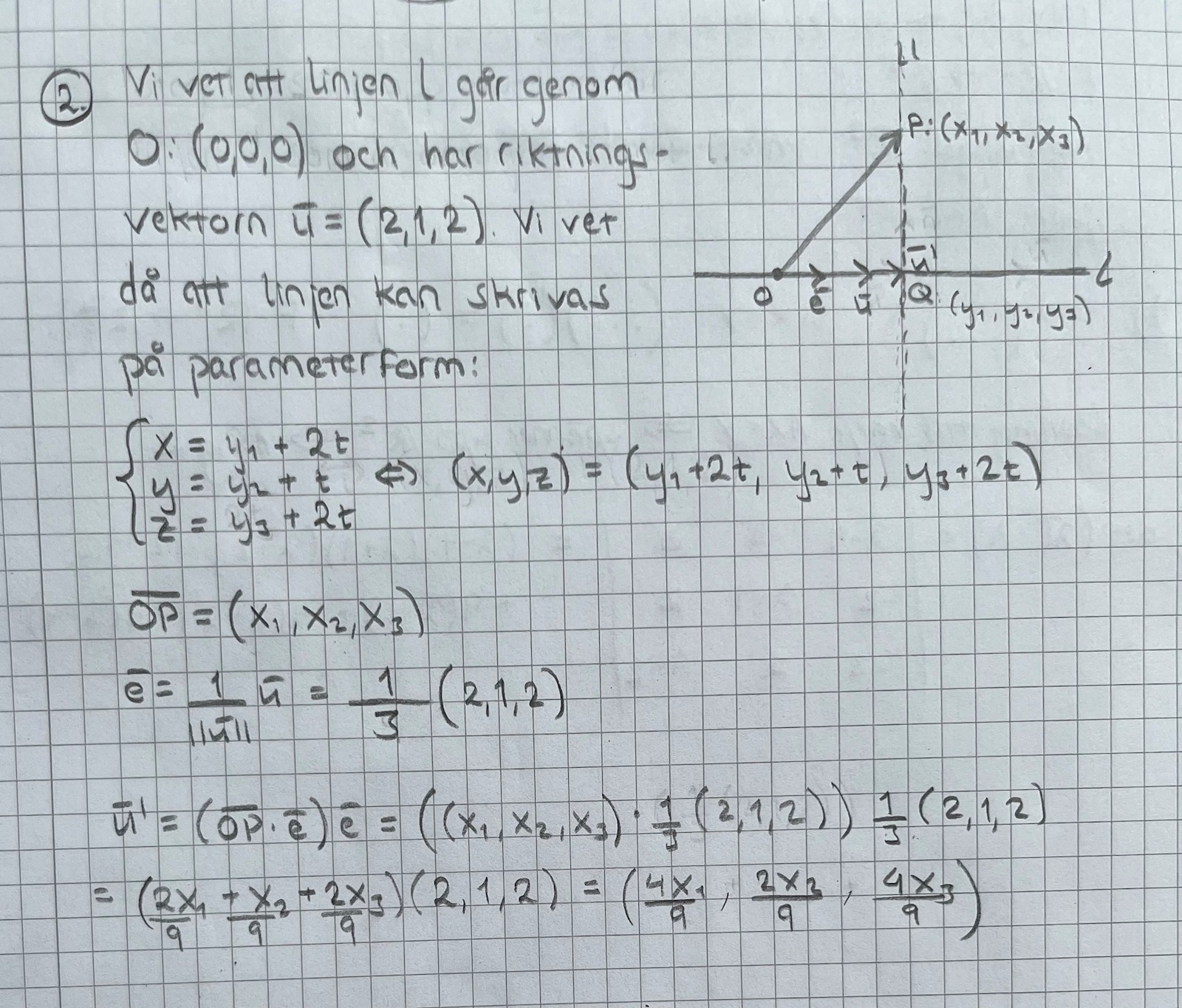
Beräkna avbildningsmatrisen för ortogonal projektion på linjen genom origo med riktningsvektor (2, 1, 2)
Ortogonal projektion trodde jag att jag hade stenkoll på, men nu när vi arbetar med en linje i R3 så blev det betydligt svårare. Eftersom en linje har oändligt med normalvektorer i det tredimensionella rummet så hjälper inte normalen här om jag förstått det rätt.
Här nedan är mina beräkningar och faktum är att jag inte tycks vara helt ute och cykla om ni jämför med facit längst ner: jag har fått korrekta siffror, men jag får ju enbart en 1x3-matris. En del av det jag skrivit i mina beräknar, t.ex. linjens ekvation, tycks jag inte få någon användning av i uppgiften. Tar tacksamt emot hjälp om hur jag löser detta! :)
Facit:


Första frågan är, hur får du fram en avbildningsmatris? Ett sätt är att räkna ut vad avbildningarna av basvektorerna är.
Ortogonal projektion betyder att du projicerar vektorn på linjen. Så, om du projicerar vektorn (1,0,0) på vektorn (2, 1, 2), vad blir det då? Vad händer om du projicerar (0,1,0)? (0,0,1)? Resultaten av dessa projektioner är kolumnerna i avbildningsmatrisen?
Du kan använda dina uträkningar men ersätta x1, x2, x3 med 0 eller 1.
Men i sista steget har du räknat lite fel. Första parentesen (summan) är ett tal, men du har liksom multiplicerat in de olika termerna i summan på de olika elementen i vektorn.

Här är en alternativ fortsättning, baserat på din uträkning. Du har kommit fram till att:
Det kan vi skriva om som en matris multiplicerat med en vektor (skalärprodukten är symmetrisk):
Nu framgår det tydligt att den i uppgiften sökta matrisen
Hondel skrev:Första frågan är, hur får du fram en avbildningsmatris? Ett sätt är att räkna ut vad avbildningarna av basvektorerna är.
Ortogonal projektion betyder att du projicerar vektorn på linjen. Så, om du projicerar vektorn (1,0,0) på vektorn (2, 1, 2), vad blir det då? Vad händer om du projicerar (0,1,0)? (0,0,1)? Resultaten av dessa projektioner är kolumnerna i avbildningsmatrisen?
Stort tack! Nu har jag löst uppgiften med denna metod. En liten fråga bara: när man tar fram en avbildningsmatris på detta vis, finns det någon föredragen variabel att använda för att hänvisa till e1, e2 och e3 (standardbasvektorerna) efter de avbildats? Eller kallar man dem F(e1), F(e2) och F(e3) ?
D4NIEL skrev:Här är en alternativ fortsättning, baserat på din uträkning. Du har kommit fram till att:
Det kan vi skriva om som en matris multiplicerat med en vektor (skalärprodukten är symmetrisk):
Nu framgår det tydligt att den i uppgiften sökta matrisen
Tack! Men jag är inte riktigt med på tankegången. Hur kommer det sig att vi tar p-transponat gånger e? Och hur kan vi sedan komma fram till att e*e transponat är samma sak som matrisen A?
starboy skrev:Hondel skrev:Första frågan är, hur får du fram en avbildningsmatris? Ett sätt är att räkna ut vad avbildningarna av basvektorerna är.
Ortogonal projektion betyder att du projicerar vektorn på linjen. Så, om du projicerar vektorn (1,0,0) på vektorn (2, 1, 2), vad blir det då? Vad händer om du projicerar (0,1,0)? (0,0,1)? Resultaten av dessa projektioner är kolumnerna i avbildningsmatrisen?
Stort tack! Nu har jag löst uppgiften med denna metod. En liten fråga bara: när man tar fram en avbildningsmatris på detta vis, finns det någon föredragen variabel att använda för att hänvisa till e1, e2 och e3 (standardbasvektorerna) efter de avbildats? Eller kallar man dem F(e1), F(e2) och F(e3) ?
F(e1) osv låter väl bra :)
starboy skrev:D4NIEL skrev:Här är en alternativ fortsättning, baserat på din uträkning. Du har kommit fram till att:
Det kan vi skriva om som en matris multiplicerat med en vektor (skalärprodukten är symmetrisk):
Nu framgår det tydligt att den i uppgiften sökta matrisen
Tack! Men jag är inte riktigt med på tankegången. Hur kommer det sig att vi tar p-transponat gånger e? Och hur kan vi sedan komma fram till att e*e transponat är samma sak som matrisen A?
Man kan se vektorer som -matriser. Om man då transponerar en vektor får man en -matris. Skalärprodukten mellan två vektorer är just en operation där man transponerar den första vektorn och matrismultiplicerar den med den andra vektorn. Låt oss beräkna längden exempel:
Eftersom och det bara är en skalär kan vi ordna om så att
Men är ju enligt matrisalgebrans regler en matris av storlek
D4NIEL skrev:starboy skrev:D4NIEL skrev:Här är en alternativ fortsättning, baserat på din uträkning. Du har kommit fram till att:
Det kan vi skriva om som en matris multiplicerat med en vektor (skalärprodukten är symmetrisk):
Nu framgår det tydligt att den i uppgiften sökta matrisen
Tack! Men jag är inte riktigt med på tankegången. Hur kommer det sig att vi tar p-transponat gånger e? Och hur kan vi sedan komma fram till att e*e transponat är samma sak som matrisen A?
Man kan se vektorer som -matriser. Om man då transponerar en vektor får man en -matris. Skalärprodukten mellan två vektorer är just en operation där man transponerar den första vektorn och matrismultiplicerar den med den andra vektorn. Låt oss beräkna längden exempel:
Eftersom och det bara är en skalär kan vi ordna om så att
Men är ju enligt matrisalgebrans regler en matris av storlek
Stort tack! Fin förklaring
