
Roterande koordinatsystem mekanik
Jag har lite strul med följande uppgift:
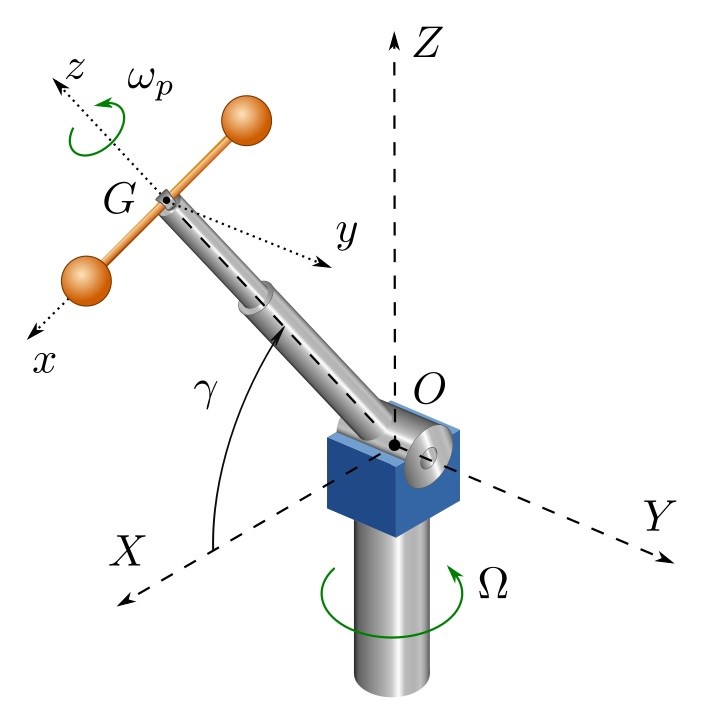
En hantel roterar i en gripklo med en konstant vinkelhastighet runt axeln OG. Gripklon OG ligger i X-Z planet och har vinkeln mot X-axeln som ändras med den konstanta vinkelhastigheten . Hela anordningen roterar sedan runt en vertikal axel med en vinkelhastighet Ω och vinkelacceleration = enligt figur.
Bestäm hantelns vinkelhastighet ω och vinkelacceleration i det avbildade ögonblicket.
Svara i X-Y-Z koordinater.
Jag får totala vinkelhastigheten till
För att därefter beräkna vinkelacceleration använder jag formeln α=Ω x ω Jag adderar även till detta.
Jag får då α till
Men detta är tydligen fel enligt facit, så jag hade behövt lite hjälp med att klura ut vad som gått snett i mina beräkningar.

, där DXYZ indikerar tidsderivatan av en vektor relativt XYZ-systemet.
PATENTERAMERA skrev:, där DXYZ indikerar tidsderivatan av en vektor relativt XYZ-systemet.
Har jag inte redan gjort detta? Jag förstår inte vad jag har missat.

svårt att veta utan att du redovisar dina räkningar, men vad är t.ex. tidsderivatan av , misstänker att du kanske fått det till 0?
Tack, jag lyckades lösa det nu. Jag förstår dock inte hur ni härleder uttrycket för vinkelaccelerationen relativt ett roterande koordinatsystem. borde det inte vara ?
Där xyz är det roterande systemet.
är xyz-systemets vinkelhastighet relativt ett "fixt" icke-roterande system.
är XYZ-systements vinkelhastighet relativt det fixa systemet.
, där D betecknar tidsderivatan av en vektor relativt det fixa systemet. Dvs detta är vinkelaccelerationen hos xyz-systemet relativt det fixa systemet.
Sedan följer resultatet mha av följande sambandsformel
