
Spegling i annan bas

Ja, det är rätt tänkt.
Allmänt gäller att vid övergång från en bas till en annan så transformeras matrisen för en linjär avbildning enligt formlerna
och inversen
Som du noterade kan du tänka dig att du har en vektor som du vill spegla.
Först transformerar vi vektorn till den andra basen
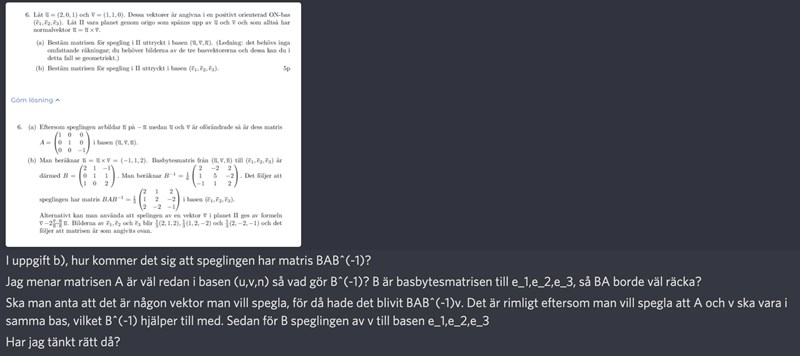
Sedan speglar vi
Och slutligen transformerar vi tillbaka
Jroth skrev:Ja, det är rätt tänkt.
Allmänt gäller att vid övergång från en bas till en annan så transformeras matrisen för en linjär avbildning enligt formlerna
och inversen
Som du noterade kan du tänka dig att du har en vektor som du vill spegla.
Först transformerar vi vektorn till den andra basen
Sedan speglar vi
Och slutligen transformerar vi tillbaka
Känns bara konstigt att man måste ha i beakt att A ska spegla en vektor som är i basen e_1,e_2,e_3 innan man ens vet att vektorn är i basen e_1,e_2,e_3
Tänk på speglingen som ett recept för en sorts julgodis, t.ex. knäck.
Oavsett på vilka språk receptet är författat hoppas vi att knäcken smakar på samma sätt, eftersom det är exakt samma recept och samma knäck vi gör. Det gör inget om receptet är på engelska eller svenska, resultatet ska bli detsamma.
Speglingen är en operation som gör exakt samma sak med en vektor, oavsett i vilket koordinatsystem den bakar vektorn.
Om vi har avbildningens matris uttryckt i ett koordinatsystem kan vi översätta avbildningen till vilket annat koordinatsystem som helst genom att använda översättningsformeln
Där är transformationsmatrisen som översätter en vektor i den nya basen till den gamla enligt .
Det är alltså liknande, men olika regler som gäller för översättningen av den linjära avbildningens matris och en "vanlig" vektor.
Jroth skrev:Tänk på speglingen som ett recept för en sorts julgodis, t.ex. knäck.
Oavsett på vilka språk receptet är författat hoppas vi att knäcken smakar på samma sätt, eftersom det är exakt samma recept och samma knäck vi gör. Det gör inget om receptet är på engelska eller svenska, resultatet ska bli detsamma.
Speglingen är en operation som gör exakt samma sak med en vektor, oavsett i vilket koordinatsystem den bakar vektorn.
Om vi har avbildningens matris uttryckt i ett koordinatsystem kan vi översätta avbildningen till vilket annat koordinatsystem som helst genom att använda översättningsformeln
Där är transformationsmatrisen som översätter en vektor i den nya basen till den gamla enligt .
Det är alltså liknande, men olika regler som gäller för översättningen av den linjära avbildningens matris och en "vanlig" vektor.
Om vektorn x redan är i den gamla basen då?
Dualitetsförhållandet skrev:Om vektorn x redan är i den gamla basen då?
Det viktiga är att du uttrycker vektorn och matrisen i samma bas innan du multiplicerar dem.
Om du har en matris i "den nya" basen kan du antingen översätta vektorn till den nya basen och genomföra speglingen där eller översätta matrisen till den gamla basen och genomföra speglingen. Resultatet blir naturligtvis samma hur du än gör.
Kom bara ihåg att uttrycka svaret i den bas som efterfrågas.
Genomför du speglingen i basen får du naturligtvis en vektor uttryckt i den basen.
