
Stokes sats

Fråga 1: jag frågade i ett annan tråd om vilken normal man ska välja, och här är det ju två normaler(eller två enkla) som blir (1,1,1) och även som blir (-2,2,1) vilken av dom är det som är korrekt? (facit nämner sista som normal, men är det ok att använda den första också?
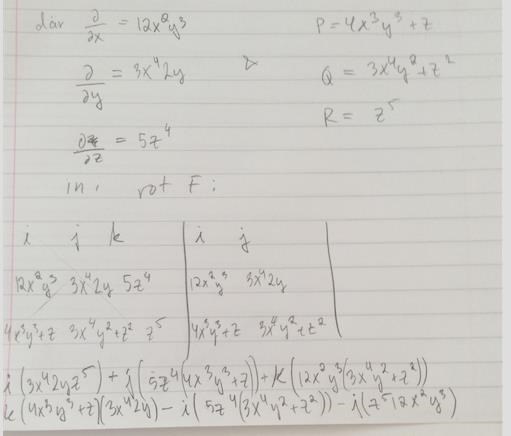
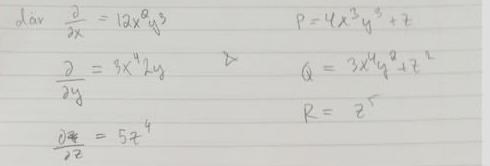
Fråga 2: sedan för att hitta rot F så använder man ju den här determinant beräkningen:
min fråga är, vad är det som egentligen är ?

Normalen (1,1,1) som du skrivit ner är ej korrekt. Om du läser igenom Guggles senaste inlägg på din förra uppgift om stokes sats ser du att om en yta parametriseras av z=f(x,y) så är en normal till denna yta (-fx,-fy,1), där fx och fy är de partiella derivatorna map x och y.
EDIT: i, j, k är basvektorerna i R3 (på mobilen, ingen formelskrivare), de utgör en ON-bas för R3.
Moffen skrev:Normalen (1,1,1) som du skrivit ner är ej korrekt. Om du läser igenom Guggles senaste inlägg på din förra uppgift om stokes sats ser du att om en yta parametriseras av z=f(x,y) så är en normal till denna yta (-fx,-fy,1), där fx och fy är de partiella derivatorna map x och y.
EDIT: i, j, k är basvektorerna i R3 (på mobilen, ingen formelskrivare), de utgör en ON-bas för R3.
shit juste.. glömde derivatan!
Moffen skrev:Normalen (1,1,1) som du skrivit ner är ej korrekt. Om du läser igenom Guggles senaste inlägg på din förra uppgift om stokes sats ser du att om en yta parametriseras av z=f(x,y) så är en normal till denna yta (-fx,-fy,1), där fx och fy är de partiella derivatorna map x och y.
EDIT: i, j, k är basvektorerna i R3 (på mobilen, ingen formelskrivare), de utgör en ON-bas för R3.
Men grejen är, om jag ska använda den matrisen som jag gjorde ovan.
då får jag:
verkar ju helt knäppt.....??
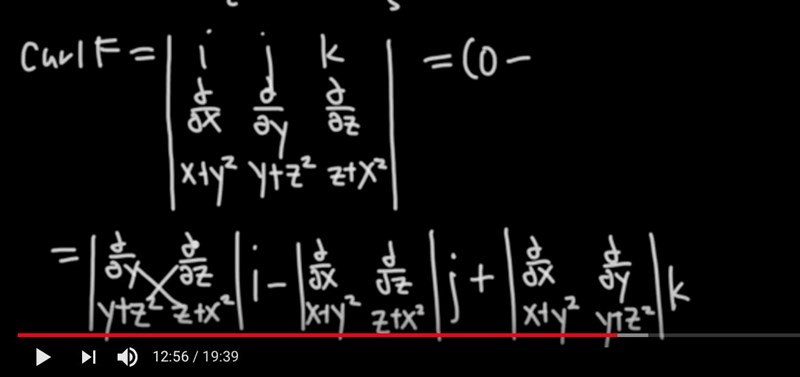
Jag förstår tyvärr inte din uträkning. Jag får rot(F) till (2z,-1,0) (fick räkna i huvudet, kan mycket möjligt ha blivit nåt fel). Beräkna determinanten formellt, skriv sedan ut dina partiella derivator och beräkna rotationen.
Moffen skrev:Jag förstår tyvärr inte din uträkning. Jag får rot(F) till (2z,-1,0) (fick räkna i huvudet, kan mycket möjligt ha blivit nåt fel). Beräkna determinanten formellt, skriv sedan ut dina partiella derivator och beräkna rotationen.
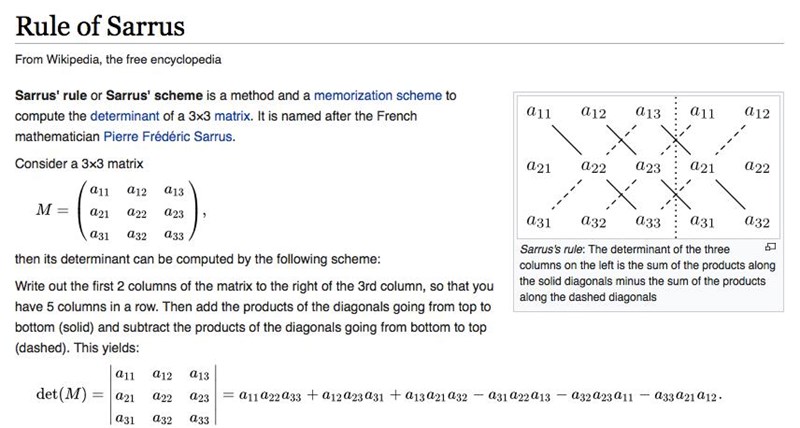
formellt? jag använder rule of Sarrus:
För att räkna rot F använder jag den här metoden:
men jag använder en annan metod när jag räknar determinanten.
och mina partiella derivator skrev jag i inlägget innan
Sarrus regel fungerar utmärkt. Varför deriverar du ex. P map x? Eller Q map y?
Moffen skrev:Sarrus regel fungerar utmärkt. Varför deriverar du ex. P map x? Eller Q map y?
ahhh det ska vara tvärtom

Alltså
Guggle skrev:Alltså
Tack Guggle
