
Topologi: mångfalder och deras rand
Hej, jag kom att tänka på skillnaden mellan inre punkt och randpunkt.
Jag har sett definitionen med öppna bollar (om varje omgivning kring punkten innehåller både... eller bara... så är den...), men den fungerar inte om n-mångfalden befinner sig i Rm m>n eftersom samtliga punkter blir randpunkter. Tex en funktionsyta (en 2-mångfald?) f: R2->R i R3. Samma med en kurva i R2.
Jag läste engelska wikipedia som hade nån konstig definition jag inte förstod. Alltså att om mångfalden i en omgivning av en punkt är isomorf med Rn så är den en inre punkt?
(Jag vet inte ens varför jag använder ordet mångfald, det verkar vara ett mycket allmännare begrepp som omfattar mer än geometriska figurer i Rn som jag egentligen frågar om)

Kul att du håller igång PA när den är lite avsomnad på sommaren, Qetsiyah!
Qetsiyah skrev:.. öppna bollar (om varje omgivning kring punkten innehåller både... eller bara... så är den...), men den fungerar inte...
Jag förstår inte vad som inte fungerar. En kurva i , en yta i eller en volym i består enbart av randpunkter (känns det som för mig i alla fall) och det är säkert det som definitionen med öppna bollar, som du nämner, säger.
Kul att du håller igång PA när den är lite avsomnad på sommaren, Qetsiyah
Jag vet! Mina funderingar kommer upp oavsett om det är skola eller inte.
När jag säger att den inte fungerar så menar jag att den inte lyckas göra skillnad på det som intuitivt kan ses som randen och inre punkter.
En cirkel i R2 har en rand och inre punkter, men hur gör man formell skillnad på rand- och inre när cirleln ligger i R3? På något sätt (en bättre definition) måste man fortfarande kunna tala om en rand.
Jag förstår vad du menar. Du vill gärna att de "inre punkterna" i en cirkelskiva ska skilja sig från de som omgärdar dem (i R2). I R3 består hela cirkelskivan av randpunkter helt enligt definitionen men det hjälps ju inte om man intuitivt tycker att det är en skillnad mellan "de inre" och "de andra". Tyvärr känner jag inte till något begrepp för den skillnaden. Det kan hända att det finns ett sådant i topologin, men jag vet inte. De är ju på något sätt sammanhängande i "alla riktningar" längs ytan lokalt (om vi bara pratar om snälla ytor). Det skulle man kunna utnyttja men jag vet inte om det finns ett begrepp för det. De kanske kommer att vara kända som qetsiayahiska punkter i framtiden?
Peter skrev:...De är ju på något sätt sammanhängande i "alla riktningar" längs ytan lokalt (om vi bara pratar om snälla ytor). ...
För att formalisera vad jag menar lite grand. Om vi tar ytan "en halvsfär" så vill du gärna skilja på punkterna på cirkeln från de andra, antar jag. Om du står på en punkt på cirkeln så finns det tangenter till ytan som gör att du hamnar utanför om du följer tangenten "epsilon långt". Det gäller inte för de andra punkterna på halvsfären. Men som sagt, jag känner inte till något begrepp för denna egenskap eller har jag bara glömt...
BTW, den del av enhetssfären där z>0 saknar rand med din definition om jag tolkar dig rätt eftersom x-y-planet inte ingår i den. Enbart qetsiyahiska punkter alltså! Visst är det härligt med reella tal!
Peter skrev:Jag förstår vad du menar. Du vill gärna att de "inre punkterna" i en cirkelskiva ska skilja sig från de som omgärdar dem (i R2).
Med bolldefinitionen skiljer de sig redan i R2, men inte i R3 alltså.
De kanske kommer att vara kända som qetsiayahiska punkter i framtiden?
Nää min fråga är verkligen inte så originell
Ditt andra stycke förstår jag inte

Väldigt bra fråga! Det finns precis som du har noterat två olika randbegrepp som visserligen är besläktade, men som dessvärre är inkompatibla med varandra när vi talar om mångfalder som ligger inbäddade i ett högre-dimensionellt omgivande rum.
Den första definitionen fokuserar väldigt mycket på det omgivande rummet. Du verkar redan ha koll på den, men för fullständighetens skull tänker jag att jag säger några ord om den ändå, samt varför halvsfären som redan har diskuterats i tråden ställer till med problem.
Definition 1. Låt vara ett topologiskt rum [alltså en mängd där det makear sense att tala om "öppna omgivningar"], och låt vara en delmängd. Då är en punkt en randpunkt om varje öppen omgivning av innehåller punkter både innanför och utanför [dvs. och ]. Mängden av alla randpunkter i kallas för mängdens rand och betecknas .
Anmärkning 1. Som vi konstaterar i den här tråden räcker det att testa så att villkoret i definitionen uppfylls för alla öppna omgivningar av som kommer från en samling 'testmängder' (a.k.a. en bas för topologin på ). Om så kan vi använda öppna bollar som testmängder.
Anmärkning 2. Ofta tillåter man även punkter utanför att vara randpunkter om de uppfyller kriteriet i Definition 1, så att blir det sluta höljet minus interiören, men det är en smaksak.
Den här definitionen har sina poänger ibland - och passar bland annat väldigt bra med vår intuition för geometriska objekt som ligger i inbäddade i ett rum med samma dimension som objektet självt har.
Exempel: Betrakta enhetsdisken
i . Det är enkelt att se att att randen utgörs av enhetscirkeln, dvs.
vilket stämmer precis med vår intuition!
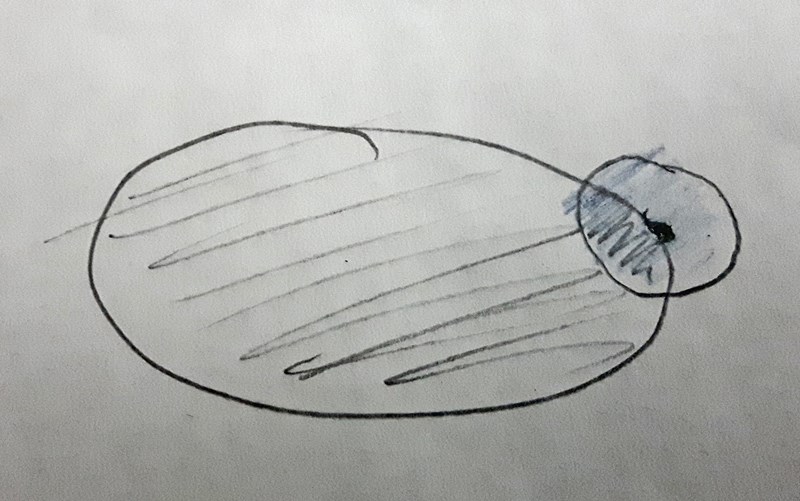
Figur: Här har jag ritat in vår disk ihop med en randpunkt och ett exempel på en blå "testomgivning" som uppfyller kriteriet i Definition 1.
Problematiskt exempel: Föreställ dig att vi är på såpbubbleblåsarhumör och får för oss att blåsa lite försiktigt underifrån på enhetsdisken från föregående exempel, så att den börjar bukta uppåt och vi erhåller halvsfären
Rimligtvis borde randen fortfarande vara enhetscirkeln som ligger kvar i -planet, men om vi betraktar som en delmängd av och applicerar Definition 1 rakt av, så får vi i stället , dvs. alla punkter är randpunkter.
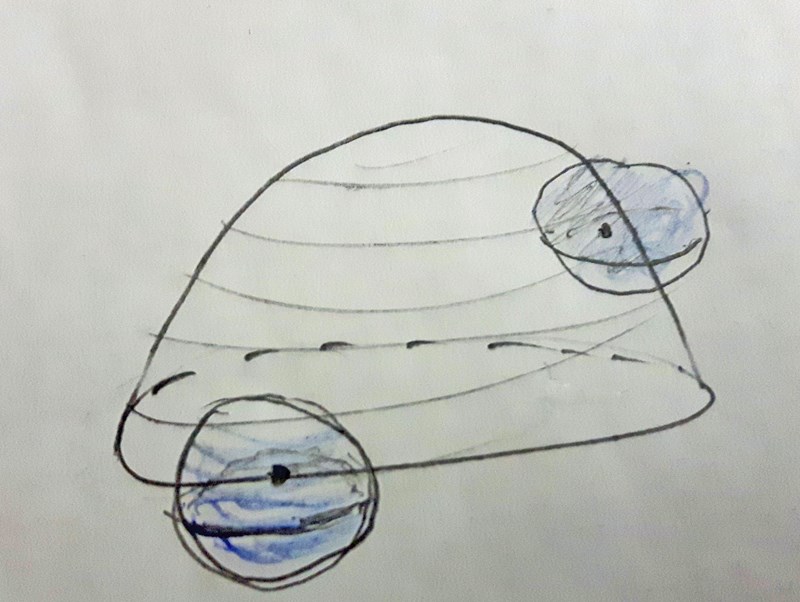
Figur: Här har jag försökt rita vår halvsfär ihop med två punkter och två exempel på blåfärgae "testbollar" som uppfyller krieteriet i Definition 1. Bara en av dessa punkter "borde" vara en randpunkt enligt vår intuition, men faktum är att båda två är det.
Vill vi ha ett mer intuitivt randbegrepp för ytor i (eller mer generellt: för mångfalder i högre-dimensionella rum), så är tricket att försöka bortse från det omgivande rummet, och i stället fokusera på hur det objektet man studerar ser ut "inifrån". Mer specifikt så kommer vi här nedanför inte att prata om öppna mängder från något omgivande rum (exv. "testbollarna" från som vi använde ovan), utan i stället öppna mängder inne i ytan (formellt: de "plåsterliknande" så kallat relativt öppna mängder som erhålls om man skär ytan med en öppnen mängd från det omgviande rummet).
Låt oss börja med att bestämma oss för vad vi menar med en yta. Det finns många olika varianter av ytbegreppet, men det kanske mest generella är helt enkelt att säga att en yta är något som "ser ut som " om vi "zoomar in tillräckligt mycket". Det som avgör om en punkt är en randpunkt eller inte, är "på vilket sätt" som omgivingarna runt punkten liknar .
Mer precist kan vi använda följande definition.
Definition 2. En yta är ett topologiskt rum , med egenskapen att något av följande altetnativ gäller för varje punkt :
- Vi kan hitta en öppen omgivning av som "ser ut som" en öppen omgivning av origo i , i bemärkelsen att det finns en bijektion med som är kontinuerlig både framlänges och baklänges (a.k.a. en homeomorfi). Om detta gäller så kallas för en inre punkt.
- Vi kan hitta en öppen omgivning av som "ser ut som" en öppen omgivning av origio i där vi har tagit bort alla punkter med negativ -koordinat, på så sätt att det finns en homeomorfi med , där . Om detta gäller så kallas för en randpunkt.
Mängden av alla randpunkter kallas för ytans rand och betecknas . De här avbildningarna från planet till vår yta brukar kallas för kartor, och kan ses som "lokala parametriseringar" som "introducerar ett lokalt koordinatsystem" på ytan.
Exempel: Det är ganska enkelt att (åtminstone intuitivt) övertyga sig om att vår halvsfär
är en yta enligt den här definitionen, och att randen blir enhetscirkeln i -planet, dvs.
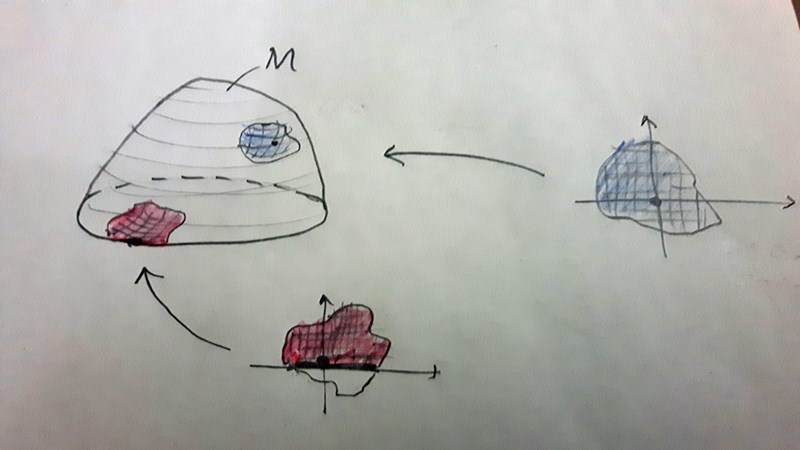
Figur: Här har jag ritat in samma två punkter som i föregående figur, ihop med två omgivningar (ett rött respektive blått "plåster" på ytan) som visar att de liknar omgivningar av origo i på olika sätt. Den ena punkten liknar en "avhuggen" öppen omgivning (och är därför en randpunkt), och den andra punkten liknar en vanlig öppen omgivning (och är därför en inre punkt).
Här är en bättre figur (delvis inspirerad av Figur 1.11 i Lees bok om släta mångfalder).
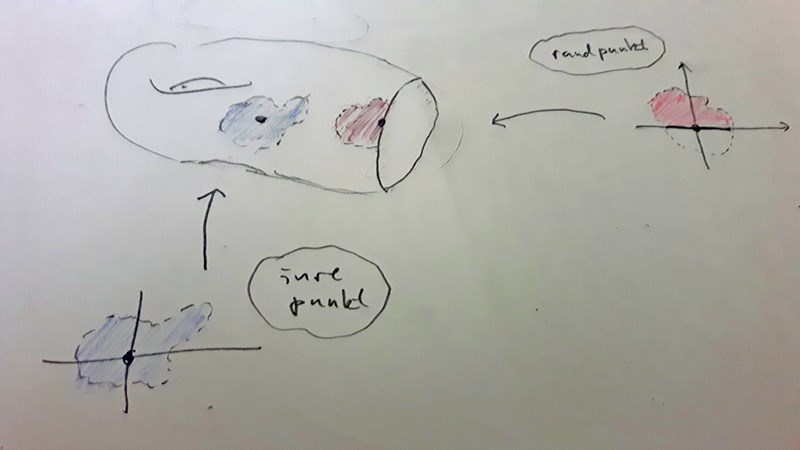
Vår yta är i detta fallet en slags "stympad torus", och jag har i figuren ovan både ritat in en inre punkt (med blå karta) och en randpunkt (med röd karta). Notera att streckade avgränsningslinjer inte tillhör mängderna - på det viset blir den här bilden kanske lite mer pedagogisk än bilderna i föregående inlägg.
Noterar du förresten kopplingen mellan Definition 1 och Definition 2? Om är en randpunkt i enighet med Definition 2, så betyder det att det det finns en öppen omgivning av som ser ut som en avhuggen öppen omgivning av origo i - och origo är en randpunkt till den här avhuggna öppna omgivningen i enighet med Definition 1!
Jag ville inte klödda till det mer än nödvändigt ovan, men det bör för fullständighetens skull ändå sägas att Definition 2 kan skrivas om till definitionen för en -dimensionell mångfald, genom att byta ut mot , och byta ut (som vi använda för att skapa "avhuggna öppna omgivningar av origo") mot
.
Det är dock värt att säga att man ofta lägger till olika typer av extra villkor i definitionen för att utesluta de mest patologiska exemplen på mångfalder, och i stället helhjärtat kunna fokusera på att formulera spännande och kraftfulla resultat om de lite snällare och trevliga mångfalder som man i praktiken bryr sig mest om.
T.ex. vill man ofta ha tillgång till en (gärna uppräknelig) uppsättning kartor som är kompatibla med varandra i bemärkelsen att "kartbyten" är oändligt deriverbara på de ställen kartorna överlappar. Många resultat kompliceras eller förstörs dessutom om det finns randpunkter, så inte sällan exkluderar man dem helt från definitionen, vilket jag bland annat gjorde i den här tråden.
Nu spammar jag tråden lite känner jag, men jag känner ändå att jag å matematikämnets vägnar vill beklaga att begreppet "rand" och symbolen används för båda de här två koncepten. Visst, de är ju som sagt besläktade, men om jag personligen fick välja, skulle vi kalla det första för något i still med "fronten" och beteckna det med (vilket bland annat nämns som ett förslag på Wikipedia), och reservera ordet "rand" och symbolen för mångfalsversionen av begreppet, där Stokes sats:
som bland annat Greens formel är ett specialfall av, faktiskt ger en koppling mellan rand och derivering/differentialer som på ett ordentligt sätt motiverar d:et som symbol.
oggih skrev:Jag ville inte klödda till det mer än nödvändigt ovan, men det bör för fullständighetens skull ändå sägas att Definition 2 kan skrivas om till definitionen för en -dimensionell mångfald, genom att...
Det är absolut nödvändigt, definitionen med homeomorfismen till avskurna kartor i R2 behövde (och kan enkelt) generaliseras till högre dimensioner så det skrek om det. Jag höll på att formulera det medan jag läste, men du postade det!
Dock undrar jag om inte villkoret "xm>0" på kartan är godtyckligt? Och som ger onödiga restiktioner på homeomorfismen? Det vi vill komma åt är väl att varje karta i Rm är "o-hel" kring origo. Det låter likt definitionen jag läste (eller tolkade som) på wikipedia. Att det inte finns en öppen omgivning av P i mångfalden (inte i rummet i vilken den är inbäddad, då blir det bolldefinitionen igen) som är homeomorf med Rm.
Är det viktigt att säga att p avbildas på origo?
Edit: peter, finns det någon speciell anledning att prata om en halvsfär i R3 istället för en cirkel?
Resonemanget för en cirkelskiva eller en halvsfär i blir detsamma. Jag valde nog halvsfär för att slippa missförstånd gällande cirkelcirkelskiva och för att den känns mer 3-dimensionell.
För att göra tråden kortare
Åh... ja jag missförstod ändå för jag blandade ihop klot (?) och sfär, men då förstår jag.
Qetsiyah skrev:[...] definitionen med homeomorfismen till avskurna kartor i R2 behövde (och kan enkelt) generaliseras till högre dimensioner så det skrek om det. Jag höll på att formulera det medan jag läste, men du postade det!
Låter som en sund matematisk instinkt!
Dock undrar jag om inte villkoret "xm>0" på kartan är godtyckligt? Och som ger onödiga restiktioner på homeomorfismen? Det vi vill komma åt är väl att varje karta i Rm är "o-hel" kring origo. Det låter likt definitionen jag läste (eller tolkade som) på wikipedia. Att det inte finns en öppen omgivning av P i mångfalden (inte i rummet i vilken den är inbäddad, då blir det bolldefinitionen igen) som är homeomorf med Rm. Är det viktigt att säga att p avbildas på origo?
Det finns många sätt att formalisera grundidén om "öppna omgivningar" och "avhuggna öppna omgivningar". Vissa formuleringar ställer mer specfika krav på exakt hur kartorna ska se ut - t.ex. när det gäller vilken punkt i som ska mappas till punkten vi är intresserade av (jag tycker det blir smidigast att kräva att origo ska mappas till punkten, medan andra föredrar att vara mindre specifika) eller när det gäller vilken koordinat som avhuggningen ska ske i (jag tycker det känns tryggt att bestämma att det alltid är den sista koordinaten, dvs. ). Vissa vill dessutom ha sammanhängande kartor - eller kartor som omfattar hela eller .
När man väl har någon slags karta brukar det vara ganska enkelt att homeomorfiskt modifera den (med hjälp av translationer, utsträckningar, koordinatbyten och liknande) till en karta som uppfyller mer specifika kriterier, så alla olika definitioner som finns i litteraturen är tack och lov ekvivalenta (i alla fall så länge författaren inte har missat något), och var och en kan välja definition lite utifrån vad som passar bäst i varje given situation. Botanisera gärna runt i grundläggande böcker om mångfalder på biblioteket, eller sök på "manifolds with boundary" och se vilka definitioner som du gillar (men var uppmärksam på det jag skrev innan, om att det ofta läggs till fler topologiska och geometriska krav än just existensen av kartor). När du har läst lite mer topologi är det en bra övning att visa vilka olika definitioner och villkor som är ekvivalenta!
Om du har en egen idé på en definition som du tycker känns mer elegant än vad jag föreslog så får du gärna försöka skriva ner den lite mer precist, så hjälper vi dig kontrollera om det blev rätt! ^_^
Okej... Jag försöker. Vi undersöker punkten p tillhörande en mångfald M. Om det finns en omgivning kring p i M så är p en inre punkt, annars randpunkt.
Jag vet ingen topologi så jag vet inte vad jag pratar om. Det jag vill åt är i alla fall att en omgivning måste vara omringande, alltså hela vägen runt, "inte avhuggen". Då behöver definitionen ingen homeomorfism till Rn alls.
När man väl har någon slags karta brukar det vara ganska enkelt att homeomorfiskt modifera den (med hjälp av translationer, utsträckningar, koordinatbyten och liknande) till en karta som uppfyller mer specifika kriterier...
Ja
För att göra tråden kortare
När man väl har någon slags karta brukar det vara ganska enkelt att homeomorfiskt modifera den (med hjälp av translationer, utsträckningar, koordinatbyten och liknande) till en karta som uppfyller mer specifika kriterier...
-------
Ja
Vill man ens så ofta skriva en explicit homeomorfism? Räcker det inte med att konstatera att det finns/inte finns? Det låter konstigt i topologi.
