
Tröghetsmoment
Hej! Hade en saftig uppgift om en uppgift om Tröghetsmoment och uppgiften ska företrädesvis lösas med MATLAB:

Alla avstånd definieras utmed vinkeln så att
Antag en massa, kg då kan fjäderstyvheten som funktion av fås mha energimetoden:
Vi har att:
Med och ansätts
Lösning ger k uttryckt i .
Med uttryckt i fås fjäderkraften som funktion av :
Vet inte riktigt hur jag ska gå vidare, jag har försökt med att projicera alla krafter utmed spännkraften samt alla krafter på reaktionskrafterna i , () och får då följande plot: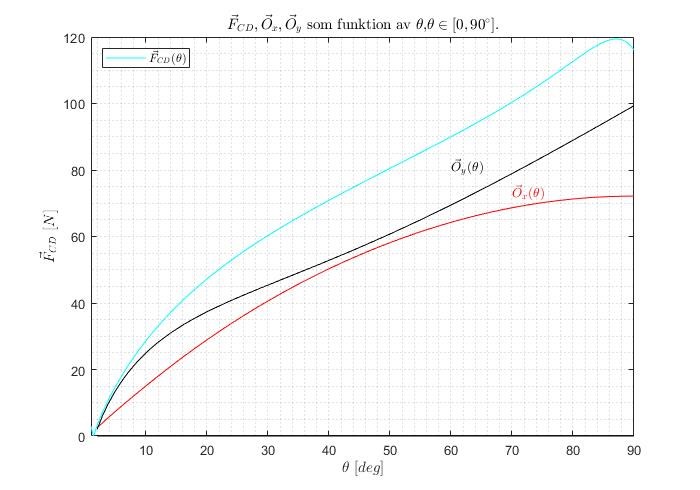
För då att vid så är samtliga krafter inte 0, utan sticker ner mot oändligheten. Tacksam för svar!

econo skrev:
Har du glömt fjäderkonstanten?
Med uttryckt i fås fjäderkraften som funktion av :
Jag förstår inte detta. Enheten är [Nm]. Är du säker på att du räknat rätt?
Vet inte riktigt hur jag ska gå vidare, jag har försökt med att projicera alla krafter utmed spännkraften samt alla krafter på reaktionskrafterna i , ()
Du bör nog ansätta summan av moment kring O lika med förändringen av rörelsemängdsmomentet.
Missade att skriva det här, men det ska vara
.
Fjäderkraften är
där .
Jag har gjort en ansättning av att summan av momentet kring O är enligt,
.
Hade lite problem med att få ut och . Men med lite ansättning på dessa, kunde jag se att ungefär samma plot (projicera alla krafter på spännkraften) fås. Plotten visar sig vara; spännkraften S antar oändligt stora krafter (som jag inte kan begripa) då . Med given spännkraft, S är tanken att samtliga krafter projiceras på
Finns det något fiffigt sätt att få ut då vi har en konstant hastighet som löper utmed ?
Du bör kanske använda det kinematiska sambandet:
Det kan vara så att kinetiken först ska tillämpas när du ska bestämma reaktionskrafterna. Detta för att du behöver bestämma innan du ställer upp den linjära delen av Newtons generaliserade andra lag. Det ser förövrigt ut som om du har introducerat ett tvång som gör att enbart en oändlig kraft kan tillåta positionen . Jag är osäker på var den introduceras.
Jag ger dig dessa små gissningar då jag just nu inte har så mycket tid att utforska uppgiften. Jag får ursäkta om de inte är så hjälpsamma.
Masssystemets rörelsemängdsmoment kring en fixerad punkt , i det Newtonska referenssystemet, är vektorsumman av momenten för den linjära momentan kring av alla partiklar i ett system,
och därmed är tidsderivatan för vektorprodukten enligt
där den första summeringen försvinner ty vektorprodukten av två parallella vektorer och är noll. Detta ger i sin tur
vilket är vektorsumman av momentet kring för alla krafter som verkar på alla partiklar i systemet. Detta moment, representerar bara de moment av krafter som ligger utanför systemet, eftersom interna krafter tar ut varandra och deras moment summerar till noll. Således definieras momentet
För fixerad axelrotation är det i allmänhet användbart att använda en momentekvation direkt runt rotationsaxeln ,
denna ekvation gäller för rotation av en stel kropp kring en icke-accelererande punkt som är fäst vid kroppen och är den tvådimensionella förenklingen av ekv. (1). Då har vi att
.
Med kinematik fås
vår kraftekvation blir därmed
.
Perfekt! Bra jobbat!
