
Vad är en linjär modell?
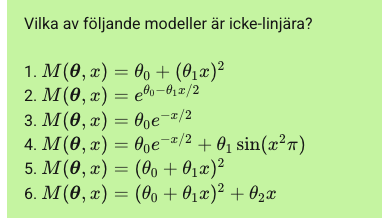
Frågan tycks vara ganska lätt men att 6 vore linjär får jag inte ihop. 5 är icke-linjär men jag ser inte hur i 6 gör den linjär. Tydligen ska man kunna byta till några oberoende parametrar där M är linjär. Jag hittar inte det bytet. Någon annan som gör det?

Jag är likaledes osäker.
Det jag tänker är att en linjär funktion (vilket inte med nödvändighet är samma sak som en linjär modell) kan uttryckas på formen y= k*x+m. I alternativ 6 kan man sätta att och låta de andra -värdena vara vad som helst, och det är då på formen y= k*x+m.
Förutsatt att m är ett positivt tal.
Vilka modeller är icke-linjära? Vad jag kan se tycks det bara vara 6:an som kan bli en linjär funktion.
Ditt resonemang låter rimligt. Det räcker att modellen är linjär i så 1, 3 och 4 är linjära för k kan ju vara 0.
Förstår dock inte heller hur 5 då kan vara icke-linjär. Man kan ju sätta .

Vad säger facit?
Att 2 och 5 är icke-linjära.

Nu vet jag inte hur exakt begreppet "linjär modell" definierades i er kurs/kursbok, men här är min gissning:
Skillnaden mellan 5 och 6 är antalet parametrar.
I 5:an har man bara två parametrar, och , och det finns inte någon möjlighet att göra ett variabelbyte så att uttrycket blir linjärt i bara två variabler.
I 6:an har man tre parametrar, , och . Det går att göra ett variabelbyte så att blir ett linjärt uttryck i tre variabler:
Med detta byte blir uttrycket , vilket är linjärt i variablerna
Det låter logiskt! Men stämmer det verkligen att parametrarna inte behöver vara oberoende? Eller beror det på hur man definierat linjär?
Detta är vår definition: 

För att en modell skall vara linjär i parametrarna krävs att koefficienterna framför de linjärt oberoende basfunktionerna kan variera fritt och oberoende. De måste kunna anta godtyckliga reella värden.
I uppgift 5 får du uttrycket , det innebär att du inte kan välja koefficienten framför helt godtyckligt utan att samtidigt ändra antingen koefficienten framför eller . Du har två frihetsgrader.
I uppgift 6 räddas du av som ger ytterligare en frihetsgrad. Då kan uttrycket tecknas
med helt godtyckliga val av parameter. Avbildningen målar upp hela .
Okej, det var ju väldigt rimligt.
Stort tack till alla!
