
Vektoranalys: olika koordinater och basvektorer
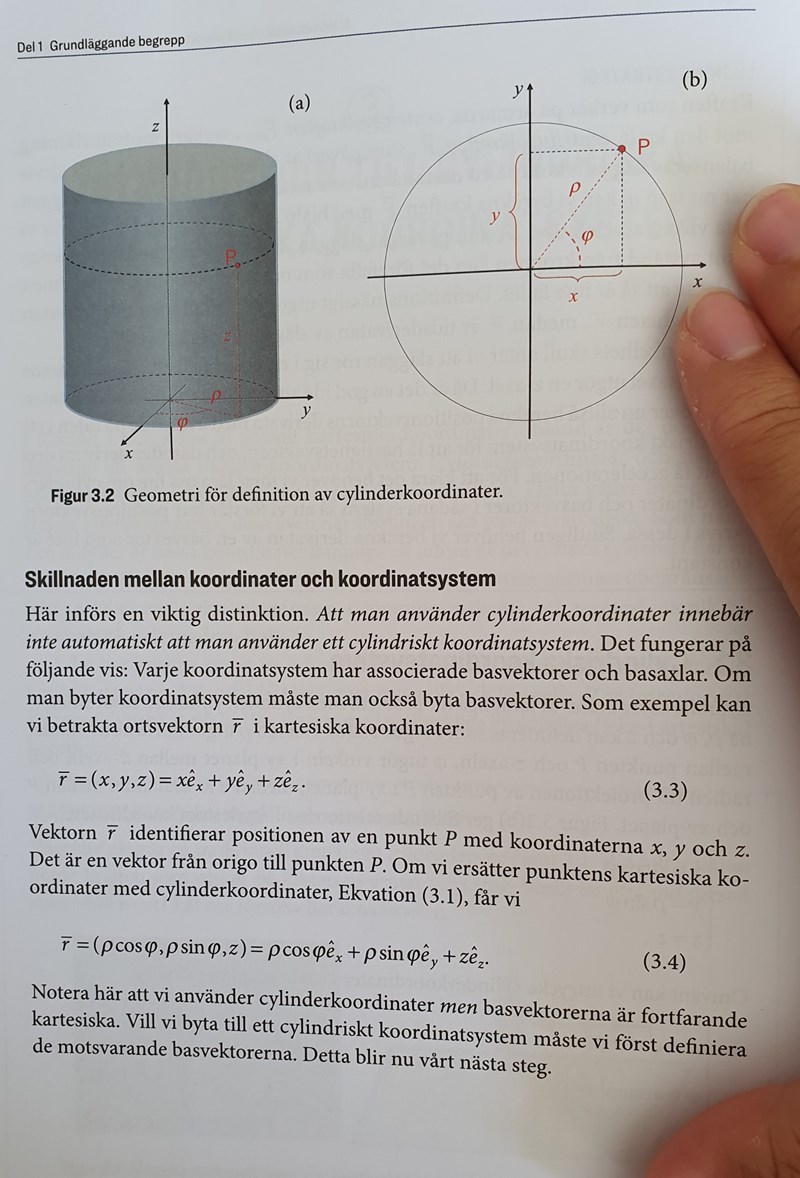
Hej, jag kan inte få grepp om skillnaden mellan koordinater och koordinatsystem. Därför gjorde jag en uppgift till mig själv att skriva vektorn (1,1,1) (i kartesiska koordinater och koordinatsystem) i följande koordinater respektive koordinatsystem:
a) kartesisk, kartesisk
b) cylinder, kartesisk
c) cylinder, cylinder,
d) kartesisk, cylinder
Såhär har jag gjort:
a) (1,1,1)
b)
c)
Är det rätt?
Kartesiska koordinater i ett cylindriskt system vet jag inte... Nån ledtråd?
EDIT: jag insåg precis att a)=b), men ska c)=d) då?
EDIT2: kan det vara ?
Edit3: mer allmänt:
Med koordinatbytena:


Otroligt viktigt att ha koll på koordinatsystem. Jag tror du blandarihop vektorer och koordinater. En vektor representeras i ett koordinatsystem med koordinater i det valda koordinatsystemet. Det bör stå beskrivet i din bok om du läser noggrannt. Det fuskas mycket med skriva vektor när man menar vektorns koordinater i ett koordinatsystem
Aerius, vad av det jag skrivit är fel? Är allt fel?
Patenteramarea, vilken av mina frågor svarar du på?
Exemplet som PATENTERAMERA gav är en vektor. Den vektorn har koordinaterna i cylindriska koordinater. Din vektor (1, 1, 1) är egentligen en representation av vektorn i kartesiska koordinater. Svårt att förklara såhär, bäst att titta i en bok som förklarar det noggrant. Och komma ihåg att det fuskas med vektorer på så sätt att skriva
och anta att läsaren förstår att basvektorerna finns där såhär
x och y är vektorns koordinater i koordinatsystemet med basvektorerna och .
Jag förstår inte vad du menar med skillnaden på koordinater och koordinatsystem. Koordinater är något en vektor har i ett koordinatsystem, det finns massor med olika koordinatsystem varav du get exempel på två.

Aerius skrev:Exemplet som PATENTERAMERA gav är en vektor. Den vektorn har koordinaterna i cylindriska koordinater. Din vektor (1, 1, 1) är egentligen en representation av vektorn i kartesiska koordinater. Svårt att förklara såhär, bäst att titta i en bok som förklarar det noggrant. Och komma ihåg att det fuskas med vektorer på så sätt att skriva
och anta att läsaren förstår att basvektorerna finns där såhär
x och y är vektorns koordinater i koordinatsystemet med basvektorerna och .
Jag förstår inte vad du menar med skillnaden på koordinater och koordinatsystem. Koordinater är något en vektor har i ett koordinatsystem, det finns massor med olika koordinatsystem varav du get exempel på två.
Har den ändå inte koordinaterna , om eftersom är inbakad i basvektorn ?
Hondel skrev:Aerius skrev:Exemplet som PATENTERAMERA gav är en vektor. Den vektorn har koordinaterna i cylindriska koordinater. Din vektor (1, 1, 1) är egentligen en representation av vektorn i kartesiska koordinater. Svårt att förklara såhär, bäst att titta i en bok som förklarar det noggrant. Och komma ihåg att det fuskas med vektorer på så sätt att skriva
och anta att läsaren förstår att basvektorerna finns där såhär
x och y är vektorns koordinater i koordinatsystemet med basvektorerna och .
Jag förstår inte vad du menar med skillnaden på koordinater och koordinatsystem. Koordinater är något en vektor har i ett koordinatsystem, det finns massor med olika koordinatsystem varav du get exempel på två.
Har den ändå inte koordinaterna , om eftersom är inbakad i basvektorn ?
Snarare koordinaten
eftersom vi har vektorn
.
Jag var lite snabb att kalla det cylindriska koordinater. Vinkeln i basvektorerna är vinkeln mellan den positiva x-axeln och basvektorn , vi har även . Spännande med vektorer, speciellt basvektorer.
Okej, jag är lite förvirrad här. Säg att vi har en vektor . Vi går över till cylindriska koordinater så att , och . Då har vi , , och sist . Då ser vi ju att vi kan skriva
.
Hondel skrev:Okej, jag är lite förvirrad här. Säg att vi har en vektor . Vi går över till cylindriska koordinater så att , och . Då har vi , , och sist . Då ser vi ju att vi kan skriva
.
Exakt! Så vektorn r i cylindriska koordinater blir? Om man tar koefficienterna framför de cylindriska koordinatbasvektorerna
I boken säger de att man kan använda en sorts koordinater utan att använda basvektorer från det systemet. Det formulerade jag i originalinlägget som att "använda [nåt system] koordinater i [nåt system] koordinatsystem".
Till exempel att använda cylindriska koordinater i ett kartesiskt koordinatsystem.
Jag tycker det var dåligt formulerat av boken. För att överhuvudtaget kunna tala om cylenderkoordinater så måste man väl rimligen först införa ett cylindriskt koordinatsystem.
Om du har en vektor, säg u = 2ex + ey + 3ez så skulle man kanske kunna tro att man alltid kan utveckla u i basvektorerna i det cylindriska koordinatsystemet enligt
u = ue + ue + uzez.
Ett problem här är att basvektorerna inte är konstanter utan funktioner av läget r. Så om man inte anger till vilken punkt i rummet som man utvärdera basvektorerna så blir uttrycket ovan inte entydigt bestämt.
Det är dock mera användbart när det gäller att beskriva ett vektorfält A(r), eftersom det då är underförstått att det finns en punkt r där man vill utvärdera fältet.
A(r) = A(r)e(r) + A(r)e(r) + Az(r)ez.
Jag förstår nu vad du menar och jag håller helt med PATENTERAMERA. Förmodligen kommer boken nå en korrekt slutsats om cylinderkoordinater vilket kan memoreras. Det boken gör kan gott och väl kallas bara koordinatbyte. Det PATENTERAMERA påtalar att basvektorerna är en funktion av läget är viktigt. Det blir tydligare när det kommer till ytor. Roliga saker!
Har du möjlighet att titta i andra böcker om koordinatsystem gör gärna det.
Nej, jag förstår inte. Vad kallas det här egentligen?:
Betyder variabelbyte samma som koordinatbyte?
Aerius, jag förstår inte vad i mitt originalinlägg som är fel.
Jag är extremt förvirrad. Är något egentligen enklare än jag tror?
Ja, eller så kan man säga koordinattransformationer.
Och vad är detta för nåt?
Basvektortransformationer?
Okej... Vad är skillnaden mellan den och koordinattransformationen?
Och vad är det omvända bytet? (står inte i boken)

Du har beräknat komponenterna i cylindriska koordinater för vektorn (1,1,1) i punkten (1,1,1). Det är tyvärr ett lite olyckligt val eftersom man då lätt blandar samman punkten och vektorn.
För att illustrera poängen kan du försöka uttrycka exakt samma vektor (1,1,1) i punkten (-1,1,1). Hur ser vektorn ut då? På vilka sätt skiljer det sig?
Jroth skrev:För att illustrera poängen kan du försöka uttrycka exakt samma vektor (1,1,1) i punkten (-1,1,1). Hur ser vektorn ut då? På vilka sätt skiljer det sig?
Va? Jag är mycket förvirrad

Qetsiyah skrev:Nej, jag förstår inte. Vad kallas det här egentligen?:
Betyder variabelbyte samma som koordinatbyte?
Aerius, jag förstår inte vad i mitt originalinlägg som är fel.
Jag är extremt förvirrad. Är något egentligen enklare än jag tror?
Ser ut som växling mellan kartesiska koordinater och polära koordinater. Z (.Cylinder) Det är ju samma punkt som är beskriven
på två olika sätt.

Det jag tror du missat är att basvektorerna snurrar med när vi önskar beskriva en vektor lokalt i en viss punkt i koordinatsystemet. Notera hur riktningen på och ändras från punkt till punkt.
Det innebär att vektorn (1,1,1) projiceras olika på basvektorerna i varje punkt.
 Kan du nu beskriva beskriva vektorn (1,1,1) i punkten (-1,1,1)?
Kan du nu beskriva beskriva vektorn (1,1,1) i punkten (-1,1,1)?
Så här ser vektorn A=(1,1,1) ut (jag placerar den pedagogiskt med angreppspunkt i (-1,1,1)

Qetsiyah skrev:Okej... Vad är skillnaden mellan den och koordinattransformationen?
Och vad är det omvända bytet? (står inte i boken)
Ja, vad skall man säga, den ena beskriver samband mellean koordinater, den andra samband mellan basvektorer.
Det är ett linjärt ekvationssystem. Du kan säkert invertera själv. Notera att sista ekvationen är trivial så du behöver bara invertera de två första.
Jroth: hmm ja jag kan föreställa mig snurrande basvektorer, fast det låter väldigt konstigt. Jag återkommer.
Patenteramera: okej...
0ρ+√2θ?
Qetsiyah skrev:0ρ+√2θ?
Ja, just det! Fast du slarvade lite. Om du tittar noga ser du att den röda pilen är motriktad i punkten (-1,1,1). Alltså blir vektorn i punkten (-1,1,1)
Exakt samma vektor fast i punkten (1,1,1) är parallell med och blir
Notera skillnaden!
Nu har vi uttryckt vektorn med hjälp av komponenterna utmed enhetsbasvektorerna
Koefficienterna kallas vektorns fysikaliska komponenter eftersom de har samma fysikaliska dimension som vektorn själv.
Så man säger att man har en vektor i en punkt? Kan vi inte bara välja origo?
Varje punkt har en egen uppsättning basvektorer, ett sorts lokalt euklidiskt rum. Det är ett pris vi får betala för att använda kroklinjiga koordinater.
Vi kan inte välja 0 eftersom ett koordinatsystem som bara består av en enda punkt inte skulle vara särskilt användbart.
Dessutom skulle just punkten (0,0,0) vara särskilt olycklig. Ett minimikrav på vår transformation är att det är en lokal bijektiv avbildning kring en punkt till en punkt .
Det betyder att jakobideterminanten för transformationen måste vara nollskild. Hur är det med den saken i (0,0,0) egentligen? Finns det andra punkter som krånglar till det?
Jroth skrev:Varje punkt har en egen uppsättning basvektorer, ett sorts lokalt euklidiskt rum. Det är ett pris vi får betala för att använda kroklinjiga koordinater.
Åh! Hmm okej. Men okej, varför bryr vi oss om att beskriva en vektor från en annan punkt?
Vi kan inte välja 0 eftersom ett koordinatsystem som bara består av en enda punkt inte skulle vara särskilt användbart.
Dessutom skulle just punkten (0,0,0) vara särskilt olycklig. Ett minimikrav på vår transformation är att det är en lokal bijektiv avbildning kring en punkt till en punkt .
Det betyder att jakobideterminanten för transformationen måste vara nollskild. Hur är det med den saken i (0,0,0) egentligen? Finns det andra punkter som krånglar till det?
Åh, något bekant från flervariabeln, men jag äter lunch, ska räkna sen.
Qetsiyah skrev:Jroth skrev:Varje punkt har en egen uppsättning basvektorer, ett sorts lokalt euklidiskt rum. Det är ett pris vi får betala för att använda kroklinjiga koordinater.
Åh! Hmm okej. Men okej, varför bryr vi oss om att beskriva en vektor från en annan punkt?
Den röda pilen är en geometrisk vektor, den är inte knuten till någon punkt och ser likadan ut var vi än placerar den.
När vi ska representera den röda pilen i något lokalt koordinatsystem så kommer representationen naturligtvis vara beroende av åt vilka håll basvektorerna pekar i just den punkten.
Men det beror alltså inte på att den geometriska vektorn ändrar sig; den geometriska vektorn känner inte till vilka koordinatsystem vi väljer att beskriva den i, den är koordinatoberoende.
Din fråga om vektorer från en annan punkt väljer jag att formulera om lite. Varför är det viktigt att förstå hur vektorer i olika punkter ser ut?
En av de viktigaste verktygen för att förstå vektorfält är derivator av olika slag, dvs hur ett fält förändrar sig från en punkt till en annan.
Lite slarvigt kan vi säga att man för att kunna jämföra fältet i två närliggande punkter behöver ta hänsyn till såväl fältets- som basvektorernas förändring.
Jroth skrev:Lite slarvigt kan vi säga att man för att kunna jämföra fältet i två närliggande punkter behöver ta hänsyn till såväl fältets- som basvektorernas förändring.
Oj, jag tror att något plingade till, det luktar ko- och kontravarians med nablaoperatorn som du förklarade i en annan av mina trådar, har jag rätt?
Men flyttar inte basvektorerna på sig radiellt med ρ också? Inte bara snurra beroende på φ
Ja, det beror på vilken bas vi studerar.
Enhetsbasvektorerna är normerade till längden 1 och beror bara på enligt
Men om bara några sidor i din bok kommer du förmodligen stöta på tangentbasvektorerna:
Det är den basen som (tillsammans med dualbasen) används när vi skapar koordinatoberoende uttryck.
Längden av varje tangetbasvektor kallas skalfaktor. Skalfaktorn för är
Om man multiplicerar ihop skalfaktorerna (eller mer egentligt den skalära trippelprodukten) får man funktionaldeterminanten, som geometriskt sett är en parallellepiped. Värt att notera är är att jakobimatrisens kolonner utgör tangentbasen.
För cylinderkoordinater är funktionaldeterminanten alltså r (eftersom
Funktionaldeterminanten dyker upp som volymskala i integraler.
Jag har bra intuition från flervariabelanalysen... Så det finns tre skalfaktorer (som är vektorer) vars skalära trippelprodukt är lika med jacobideterminanten för övergången från kartesiska rummet till i det här fallet cylinderrummet?
Värt att notera är är att jakobimatrisens kolonner utgör tangentbasen.
Fattar inte riktigt varför men mind=blown
En av de viktigaste verktygen för att förstå vektorfält är derivator av olika slag, dvs hur ett fält förändrar sig från en punkt till en annan.
Lite slarvigt kan vi säga att man för att kunna jämföra fältet i två närliggande punkter behöver ta hänsyn till såväl fältets- som basvektorernas förändring.
När jag läser detta igen forstår jag totalt, det är inte alls konstigt
Qetsiyah skrev:Jag har bra intuition från flervariabelanalysen... Så det finns tre skalfaktorer (som är vektorer) vars skalära trippelprodukt är lika med jacobideterminanten för övergången från kartesiska rummet till i det här fallet cylinderrummet?
Ja, det stämmer, förutom att skalfaktorerna är reella tal, det är längderna (L2-normen) av tangentbasen. Låt oss titta på tangentbasen igen:
, skalfaktor ty
, skalfaktor ty
, skalfaktor ty
Den skalära trippelprodukten är
Det är samma sak som
Vilket är samma sak som
Vilket är samma sak som
Nu tycker jag att jag har fastnat på det här för länge, men tror att jag har gjort lite framsteg. Rätta mig om följande.
Det är alltså så att det finns lokala koordinatbaser (inte globala) i varje punkt, eftersom koordinatbaserna i generella kroklinjiga koordinatsystem inte är konstanta som i det kartesiska systemet. Dessa lokala baser kallas tangentbaser eftersom de är tangenter till koordinatlinjerna.
But theres is more. Vi kan välja mellan att uttrycka en vektors koordinater på ett kovariant sätt eller kontravariant sätt. När vi använder kontravarianta koordinater kommer de förändras kontra basernas förändring, dvs koordinaterna blir mindre när basvektorerna blir längre. Kovariant är tvärtom.
Men vad är dualbasen för nåt? Och vad betyder det när vi kallar basvektorer ko och kontravarianta? Är det inte en egenskap av en vektors koordinater?
Qetsiyah skrev:
Det är alltså så att det finns lokala koordinatbaser (inte globala) i varje punkt, eftersom koordinatbaserna i generella kroklinjiga koordinatsystem inte är konstanta som i det kartesiska systemet. Dessa lokala baser kallas tangentbaser eftersom de är tangenter till koordinatlinjerna.
But theres is more. Vi kan välja mellan att uttrycka en vektors koordinater på ett kovariant sätt eller kontravariant sätt. När vi använder kontravarianta koordinater kommer de förändras kontra basernas förändring, dvs koordinaterna blir mindre när basvektorerna blir längre. Kovariant är tvärtom.
Ja! Exakt så!
Men vad är dualbasen för nåt? Och vad betyder det när vi kallar basvektorer ko och kontravarianta? Är det inte en egenskap av en vektors koordinater?
Ko- och kontravarians beskriver hur tensorn uppför sig vid ett koordinatbyte, som du själv påpekade ovan! Det är alltså en egenskap hos vektorn (tensorn).
Det finns alltså två huvudsakliga beteenden. För att krångla till det kan man också skapa "blandade" tensorer. De har index både där uppe och där nere.
Dualbasen är bara en bas för dualrummet.
-----------------------------------------------------------------------------------------------
Men din nästa naturliga fråga är då "Men vad är dualrummet?"
Det ligger tyvärr flera abstraktionssteg mellan en mer generell tensoralgebra på en mångfald och den tensoralgebra man använder på cartesiska tensorer (affin tensoralgebra). Rom byggdes inte på en dag, mitt råd är att skynda, om inte långsamt så i lagom takt.
Som den här tråden visar är det viktigt att skilja mellan ortsvektorn till en punkt P och punkten P själv.
Vi måste också skilja mellan en vektor som överlagras på det euklidiska rummet och rummet självt. Vektorn är INTE en del av . Elementen i rummet är bara punktmängden (skilj alltså på punkten (1,1,1) och vektorn (1,1,1) som i tråden ovan!).
Du kan förenklat se det som att mängden av alla tensorer av typ (r,s) i punkten P utgör ett vektorrum av dimension . Kovarianta vektorer är av typen (0,1). Kontravarianta vektorer är av typen (1,0)
Det betyder att kovarianta vektorer lever i ett rum och kontravarianta i ett annat.
Tensorer av olika typ får INTE adderas eller idka umgänge på annat sätt än genom regler satta av rummets egenskaper (t.ex. bilda skalärprodukter genom metriken). Däremot får de multipliceras (och på det sättet bilda nya tensorer som lägger sig i helt nya rum). Undantag finns för specialfall. t.ex. affina tensorer.
Mer specifikt brukar man för punkten P kalla rummet där de kontravarianta vektorerna bor tangentrummet och rummet där de kovarianta vektorerna bor det duala tangentrummet .
