
Vinkelhastighet och vinkelacceleration
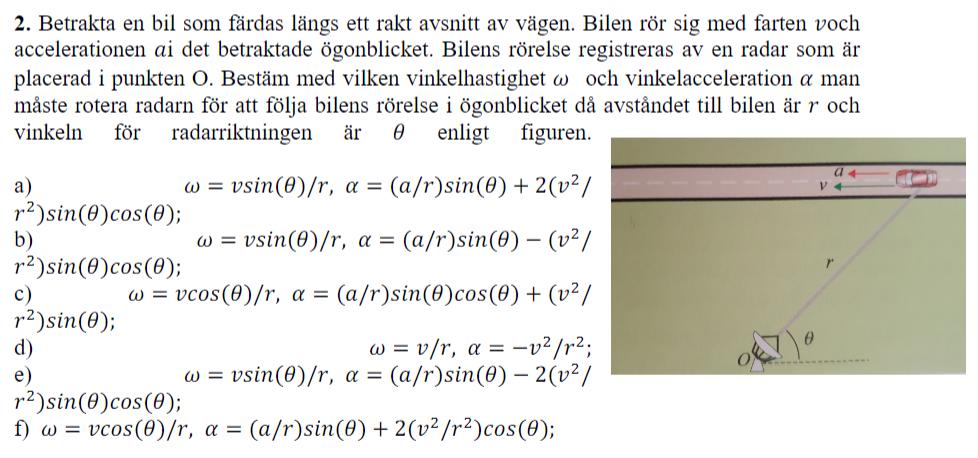
Försöker lösa följande problem med cylinderkoordinater men fattar inte hur de får fram svaret. Borde inte vinkelhastigheten vara roten ur? Och kan någon vänlig själ visa hur de kommit fram till svaret (som är a)?

Börja med hastighetsvektorn v
Rita in v i ett koordinatsystem som tydligt visar och i förhållande till den gröna pilen v. Var noga med att märka ut vinkeln
Vad blir komposanterna av v i - och -led?
D4NIEL skrev:Börja med hastighetsvektorn v
Rita in v i ett koordinatsystem som tydligt visar och i förhållande till den gröna pilen v. Var noga med att märka ut vinkeln
Vad blir komposanterna av v i - och -led?
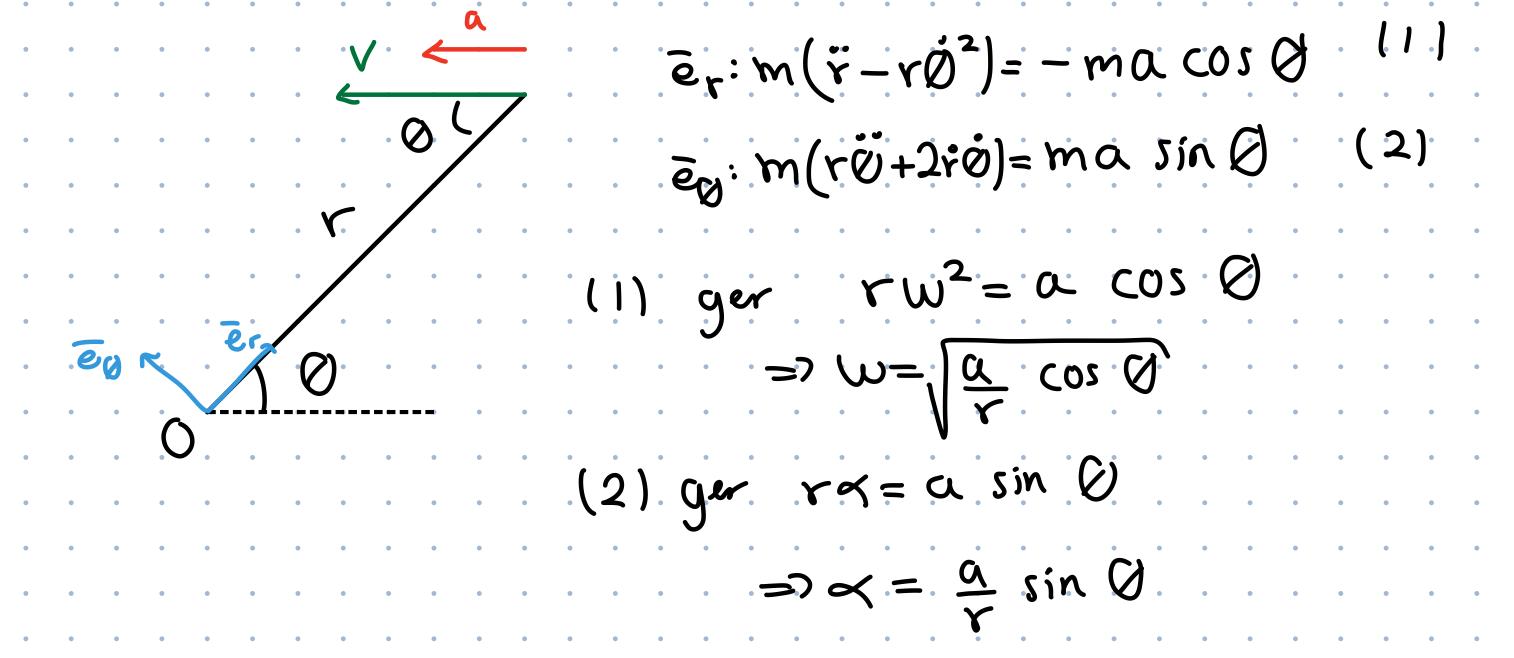
Här är mitt försök. Tänker att r är konstant (vet annars inte hur man ska beräkna rprick och rprickprick?)
Bra och tydlig figur!
Men är inte konstant. Det kan du övertyga dig om genom att flytta bilen så den står rakt ovanför radarstationen. Då är kortare, alltså har radien ändrats, alltså
Eftersom vi redan vet exakt hur bilen rör sig, nämligen utmed vägen i negativ x-led med hastigheten och accelerationen behöver vi inte ställa upp Newton II.
För att få fram ett enkelt samband för behöver vi använda vad vi vet om hastigheten.
Vi börjar med att härleda hastigheten i polära koordinater genom att derivera lägesvektorn en gång
Jag hoppas att det är något du känner igen från bok/föreläsning. Från din bild ser vi att hastigheten i -led ska vara . Sammanställer vi det med ekvation i -led får vi
Vilket är vinkelhastigheten man söker. Sammanställer du istället i -led får du ett samband för . Det kan du använda när du bestämmer accelerationen. Använd samma teknik (dvs projicera på axlarna och jämför med andraderivatan av lägesvektorn vilket är samma sak som de uttryck du fått fram för accelerationen i ditt eget lösningsförslag)
