
Vinkelhastighet uttryckt som vinkel theta
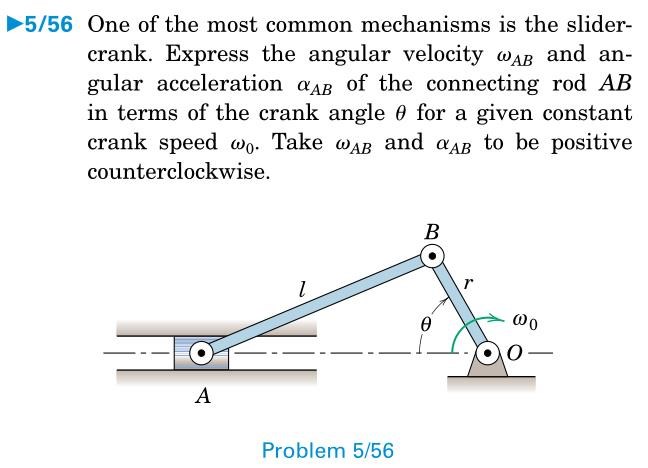
Hej! Jag har lite problem med att lösa denna typ av uppgift med hjälp av vektor produkt.
(Har löst uppgiften med hjälp av sinussatsen och deriveringsoperatorn .)
Jag har försökt följande:
Vektorn
och därmed är vinkelhastigheten
Matar in allt i MATLAB men får då inte rätt svar jfrt. med metoden av sinussatsen.
clear all; close all;
syms r theta l w0
W0=[0;0;-w0]
OB=[-r*cosd(theta);r*sind(theta);0]
vB=cross(W0,OB)
OA=[-r*cosd(theta)-(l^2-r^2*(sind(theta))^2)^(1/2);0;0]
AB=OB-OA
wAB=cross(AB,vB)
% Testar parametrar
r=0.5; l=1; w0=5;
fplot(subs(wAB(3)),[0,90])
Det rätta svaret i MATLAB:
clear all
syms theta
r = 0.5; l=1; w0=5 % Testar parametrar
omega_AB = r*w0*cosd(theta)/(l*sqrt(1-(r/l*sind(theta))^2))
fplot(omega_AB,[0,120])
Jag har löst det!
Jag har testat att ta bort x komposanten i så att där tanken är att det bara är y-komposanten som ger upphov till en vinkelhastighet vid . Jag har nu jämfört graferna och får följande:
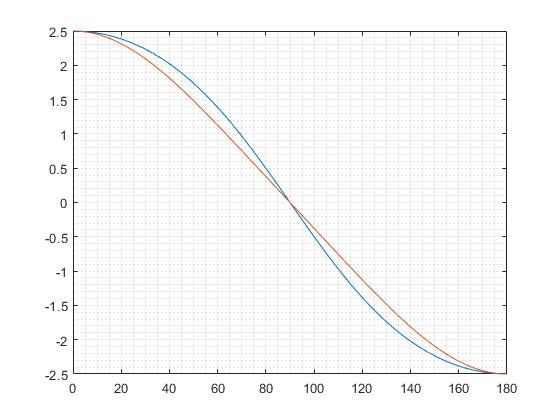
Det skiljer sig lite från graferna, där den blåa grafen ska vara den rätta så att säga. Vet ej vad detta kan bero på!

Jag tror inte du kan ta bort x-komposanten i , för den kommer att ge upphov till vinkelhastighet på också. (Enda tillfället när den inte gör det är när AB är parallell med x-axeln, dvs då täta är 0).
Jag tror att din ekvation för uträkning av ifrån den spatiellla hastigheten kan vara fel. Jag kan inte säga vad som är fel eftersom jag är för rostig på räkneregler för kryssprodukter. Men en enhetsanalys visar att om du multiplicerar en längd med en hastighet , så får du inte en vinkelhastighet .
JohanF skrev:Jag tror inte du kan ta bort x-komposanten i , för den kommer att ge upphov till vinkelhastighet på också. (Enda tillfället när den inte gör det är när AB är parallell med x-axeln, dvs då täta är 0).
Jag tror att din ekvation för uträkning av ifrån den spatiellla hastigheten kan vara fel. Jag kan inte säga vad som är fel eftersom jag är för rostig på räkneregler för kryssprodukter. Men en enhetsanalys visar att om du multiplicerar en längd med en hastighet , så får du inte en vinkelhastighet .
Vinkelhastigheten, är som störst då , vi har en konstant vinkelhastighet vid B. Vinkelhastigheten är noll då och byter tecken då . Vinkelhastigheten är snarare noll då riktningsvektorn för är parallel med .
Det är väl frågan om man kan få ut vinkelhastigheten mha .

Vi kan uttrycka hastigheten för punkten B på två olika sätt
Där , , och .
Eftersom hastigheten för A i y-led är 0 blir ekvationen särskilt enkel i y-led
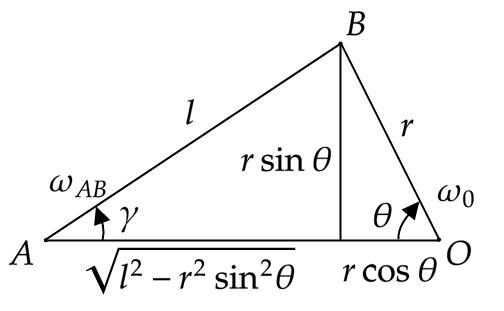
Ett samband mellan vinkeln och ges av sinussatsen
Alltså blir svaret på uppiften
Riktigt snyggt!
Jag antar då att ett uttryck för vinkelaccelerationen är om man deriverar ekvationen map tiden
?
Eller skulle det vara bökigare att kryssa igen enligt
?
econo skrev:JohanF skrev:Jag tror inte du kan ta bort x-komposanten i , för den kommer att ge upphov till vinkelhastighet på också. (Enda tillfället när den inte gör det är när AB är parallell med x-axeln, dvs då täta är 0).
Jag tror att din ekvation för uträkning av ifrån den spatiellla hastigheten kan vara fel. Jag kan inte säga vad som är fel eftersom jag är för rostig på räkneregler för kryssprodukter. Men en enhetsanalys visar att om du multiplicerar en längd med en hastighet , så får du inte en vinkelhastighet .
Vinkelhastigheten, är som störst då , vi har en konstant vinkelhastighet vid B. Vinkelhastigheten är noll då och byter tecken då . Vinkelhastigheten är snarare noll då riktningsvektorn för är parallel med .
Det är väl frågan om man kan få ut vinkelhastigheten mha .
Ja. Det är det som är frågan. Jag tror inte du kan beräkna vinkelhastigheten sådär, eftersom enhetsanalysen visar att det blir fel.

econo skrev:Riktigt snyggt!
Jag antar då att ett uttryck för vinkelaccelerationen är om man deriverar ekvationen map tiden
?
Då gör du det du redan gjort på ett mer omständligt sätt.
Eller skulle det vara bökigare att kryssa igen enligt
?
Du kan ställa upp accelerationen enligt tillvägagångssättet de går igenom i avsnitt 5/6. Det finns flera sample problem där som visar hur man gör.
En exempellösning:
Här har vi att eftersom punkten O är fix och vinkelhastigheten är konstant. Vi får:
Vi ställer nu upp ett uttryck för :
Vi får:
Detta ger om du jämför - och -termer:
Den andra ekvationen ger oss:
Med det som Jroth tagit fram kan du ta fram ett uttryck som enbart beror på ursprungsvariablerna , , och .
Om man inte ska inblanda sinussats eller dylikt kan uppgiften lösas med vektorer enligt:
.
Vi har att
=
Detta ger
Lösning av systemet ger resp. uttryckt i så att
Uttrycket för fås mha av
resten är historia...
