
Mekanik - Kan man få riktningarna att bli "rätt" automatiskt?
Halloj!
Jag håller på att studera följande exempel från en gammal tentamen:
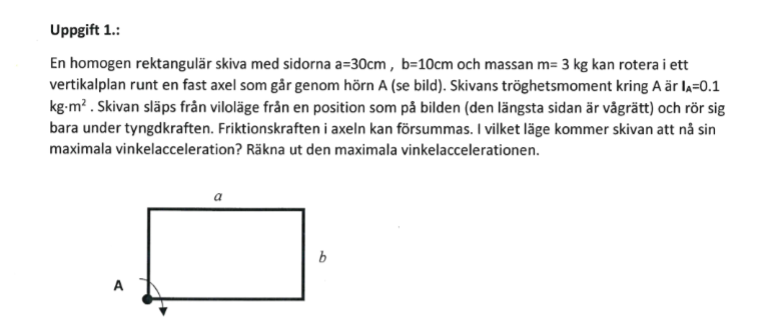
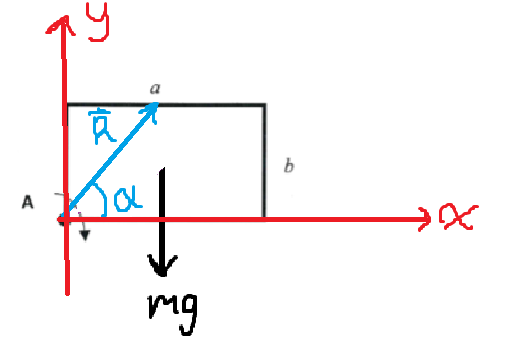
Jag tänker mig att jag vill jobba i ett högerorienterat koordinatsystem, så att jag kan "fuska" med högerhandsregeln. Jag tänker att skivans vänstra, nedre hörn ligger i origo och att skivan ligger i -planet. Om vi drar en vektor från rotationsaxeln till skivans masscentrum och inför några fina storheter får vi följande bild:

Skivan har något rörelsemängdsmoment med avseende på rotationsaxeln som torde ges av:
där enligt högerhandsregeln är en vektor som pekar in i planet (vinkelhastigheten är negativ).
Tyngdkraftens vridmoment på skivan med avseende på axeln ges av:
Newtons andra lag för rörelse kring en axel säger oss sedan:
Här undrar jag hur man ska fortsätta så att tecknen blir rätt automatiskt. Hur ser denna ekvation ut på icke-vektor-form då vi satt in våra värden? Högerhandsregeln ger att både och pekar i samma riktning men jag är ändå osäker på tecknen... Eftersom minskar vill jag ju helst att vinkelaccelerationen får negativt tecken...

Derivera alltså , och sätt lika med .
Momentet och förändringen av rmm är alltid samma så man kan använda den ena för att ta reda på riktning av den andra.
Var kommer minustecknet ifrån? Jag tänker att vinkelhastigheten har negativt tecken i sig redan eftersom vinkeln blir mindre. Går det inte att tänka så?
Nu vet jag inte hur du satt ditt x och y men jag antar "som vanligt". Och då ser vi enligt bland annat skruvregeln att rotationsvektorn är riktad in i pappret.
Tecknet ingår inte på det sättet i beteckningen för de olika storheterna. Man behöver tecknet för att göra beräkningar.
Jag håller med om att rotationsvektorn ska peka inåt. Men om jag bestämmer att vinkeln definieras som i bilden ovan, och vi vet att har ett tidsberoende, då borde väl av sig självt? Eftersom vinkeln minskar då tyngdkraften får skivan att rotera.
Ja, asså vi kan förvänta oss det ja. Men för att våra beräkningar ska bli korrekt behöver vi lägga till tecken. Det kan finnas tecken som inte är lika uppenbara så att hålla koll på både tydliga och otydliga tecken är inte en bra ide.
Inser nu att det kanske har blivit lite konstigt med mina beteckningar. Vinkeln är väl konstant haha?
Om du definierat den mellan r och den långa sidan så ja, annars, vilket jag trodde, alltså mellan r och x-axeln, så nej.
Det är viktigt att rita ut koordinataxlarna i sin figur, men det har du förmodligen gjort på ditt papper.
Jo precis, jag tänkte mig en vinkel mellan -axeln och ortsvektorn till masscentrum. Tydligen lyckades jag bli förvirrad av min egen figur och feltolka den...
Nu är det dags att slagga, med andra ord!
Återkommer imorgon.
Älskar när det händer! :)
Okej, nu tror jag att jag fick till det.
Vi har , eftersom högerhandsregeln ger en vektor som pekar i negativ -riktning.
Vidare har vi , där betecknar vinkeln mellan vektorerna. Vi får alltså även här en vektor som pekar i negativ -riktning.
Newtons andra lag ger:
Vi kan stryka enhetsvektorerna och minustecknen och blir kvar med:
Och resten är enkel!
Ser det bra ut så?
Tillägg: 21 maj 2025 13:21
Varför blir formatteringen så konstig om man försöker använda \ddot ? Det ser ju bra ut med bara \dot...
Snyggt!
Latexen här är väl inte jättesmooth. Finns det något som \displaystyle som fungerar för annat (vektorer, hattar, bars osv). De blir ofta fula för mig.
Visst spelar det ingen roll mellan vilken vektor och -axeln vi väljer att mäta ? Jag valde ju den vinkeln ganska godtyckligt.
Det finns nästan inget som spelar roll om man tar hänsyn till det i alla sina beräkningar.
Men om jag hade dragit min figur så här:
Hade något förändrats då för uttrycket för skivans rörelsemängdsmoment?
Eller tänker vi att skivan är en "punktmassa" med tröghetsmoment och massa , dvs vinkeln i uttrycket är punktmassans (masscentrets) vinkel runt rotationsaxeln?
Vinkelhastigheten är samma för alla punkter på objektet så det spelar ingen roll var du sätter den. För att beräkna givet ett tröghetsmoment och och vinkelhastighet är det enda kravet att rotationen och tröghetsmomentet är definierade runt samma punkt/axel.
Yes precis, det var det jag tänkte! Ville bara bekräfta att min kassa fysikaliska intution stämde för en gångs skull.
Tröghetsmomentet ihop med vinkelhastigheten sköter allt för dig, vilket är skönt. Skulle man vilja räkna med definitionen måste man hela tiden beräkna enskilda med för små massdelar med och sedan summera allt ihop. Det fiffiga är all summation av massdelar redan är gjord i vår definition av . Väldigt fiffigt. Det är ju såklart ett sådan resonemang som sker i härledningen av formeln.
Precis, problemet i vårt fall är att blir annorlunda beroende på vilket masselement vi betraktar eftersom vi rör oss i en cirkel? Men om vi hade haft translationell rörelse istället hade det varit helt OK trots att vi inte jobbar med en punktmassa, eller hur? Eftersom alla masselement har samma hastighet.
Alltså i en situation som denna där en kloss bara rör sig rakt ned:
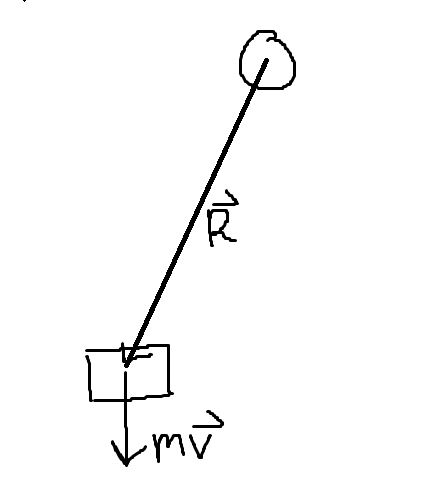
Så hade vi utan förbehåll kunnat räkna ut genom eftersom klossen rör sig translationellt.
Så borde det vara ja.
