
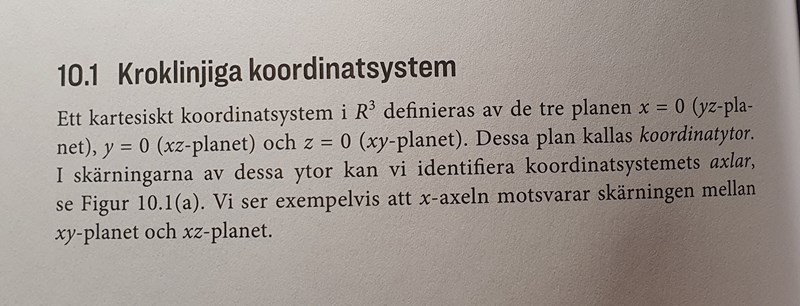
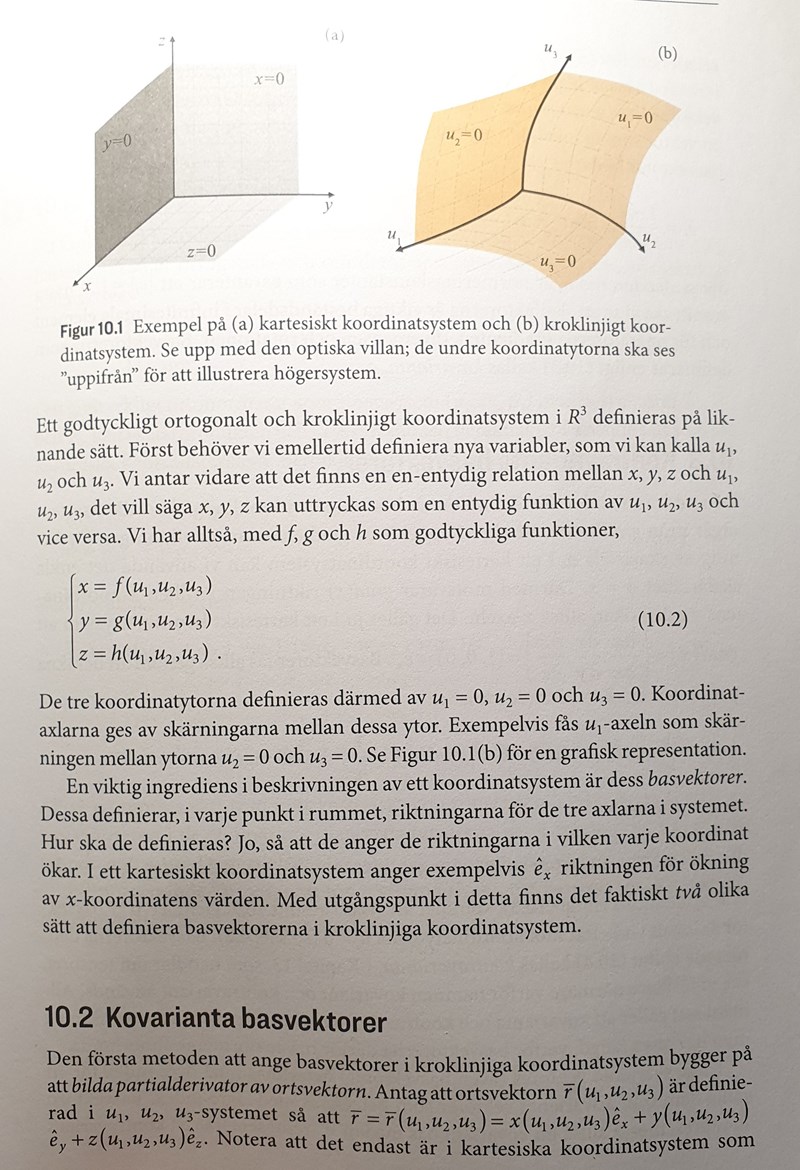
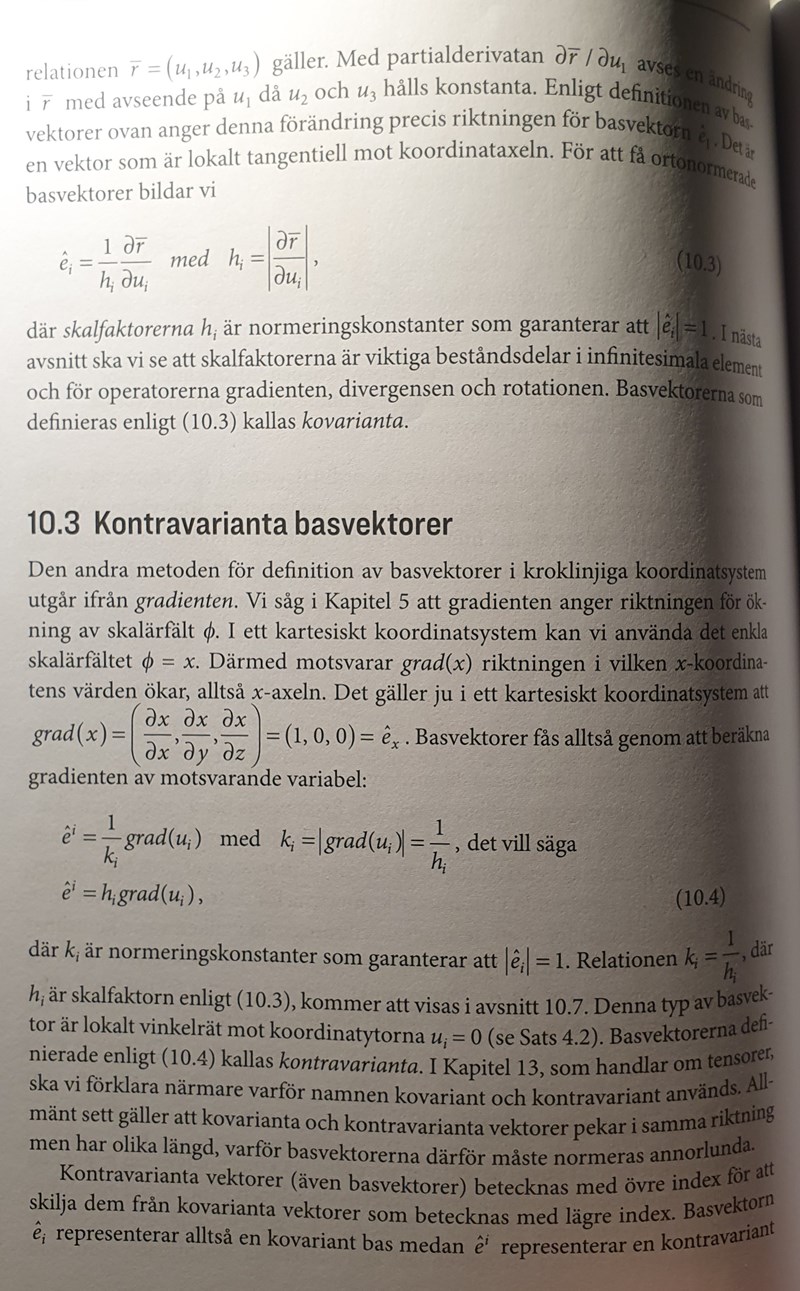
Vektoranalys: lärobok förvirrar mig, den säger att tangentvektorbasen är kovariant
Hej, precis när jag kände att jag gjorde lite framsteg och återvände till den här vektoranalysboken så blir jag disillusionerad igen, se:
Visa spoiler
Dessutom använder de index tvärtom det konventionella, jag fattar ingenting.

Jag håller med om att det är kontra(!)intuitivt att kalla basen för det kontravarianta rummet en kovariant bas.
Med det är faktiskt den notation jag tror du känner igen från din tensortråd.
Om är en bas för V med korresponderande dualbas för där
och
kan vi uttrycka valfria element som
och
De enskilda komponenterna identifieras genom och
Så den kontravarianta vektorn (egentligen listan med komponenter) hör till men för att uttrycka den som en "riktig" vektor måste vi koppla på basen för, dvs . Med påkopplad bas alltså .
Förutom att det ger oss ett korrekt uttryck i notationen (Einsteins summakonvention) kommer det småningom visa sig att basen själv, , transformerar som en kovariant tensor med varje enskild basvektor som element och vice versa för .
För att sammanfatta: Index där uppe betyder kontravariant. Index där nere betyder kovariant. Och hur konstigt det än verkar är basen för kovariant, basen för kontravariant (och det stämmer ju med deras index!).
Boken du följer har förmodligen inte introducerat något dualrum och kanske fortfarande ser ko- och kontravarianta vektorer som hörande till _samma_ rum. Men den följer en mall som förbereder en utvidgning av teorin. Tangentbasvektorerna är de vanliga du känner igen. Vidare kan du direkt utnyttja skalärprodukten (som parbildning) för att fixera det boken kallar de kontravarianta basvektorerna.
Bokens är alltså bara de vanliga i mer utvidgad teori.
Jroth skrev:Boken du följer har förmodligen inte introducerat något dualrum och kanske fortfarande ser ko- och kontravarianta vektorer som hörande till _samma_ rum.
Ja
Men den följer en mall som förbereder en utvidgning av teorin. Tangentbasvektorerna är de vanliga du känner igen. Vidare kan du direkt utnyttja skalärprodukten (som parbildning) för att fixera det boken kallar de kontravarianta basvektorerna.
Bokens är alltså bara de vanliga i mer utvidgad teori.
Ok
Jag tror att jag har varit slarvig och förvirrat mig själv när det gäller kontra och kovarians. Jag säger att en vektor är kontravariant om dess komponenter är det. Boken skriver om basvektorers är kontra/kovarians här... Så stämmer detta?:
Tag . Komponenterna kallas kontravarianta för att de är kontravarianta vid basbyte, men är kovarianta... När? Vid transformation av vad?
Och hur konstigt det än verkar är basen för V kovariant, basen för V* kontravariant (och det stämmer ju med deras index!).
Ja det gör det...
Under transformation kommer komponenterna transformeras enligt komponenterna i en kovariant tensor och därför är en kovariant tensor.
Låt oss använda de beteckningar du postade i tensortråden och studera ett konkret exempel. För en kovariant tensor ska tydligen:
![]()
Så
Låt oss använda två dimensioner och polära koordinater, först skriver vi ut hela kontraktionen
Jakobianen (för ett byte från cartesiska till polära koordinater) ger oss
Så de transformerade tangentbasvektorerna i det polära systemet måste alltså vara:
